



- By YIKONG
- 2026-03-06 10:54:23
- 公司动态
工业移动机器人发展趋势:从自动化搬运到智能协同系统
1 前言
工业移动机器人是应用于工业级物流与制造场景中的智能装备。此类机器人通常配备导航系统,由车载控制系统统一控制,以轮式移动结构为主要运动形式,并集成动力系统或动力转换装置,实现物料搬运、生产协作和自动配送等任务。

从系统结构来看,工业移动机器人通常由车体结构、驱动装置、执行机构、安全防护装置、控制系统、电源系统、导航系统、通信系统以及人机交互系统等多个模块组成。这些系统的高度集成,使机器人能够在复杂工业环境中实现稳定、安全和高效的运行。
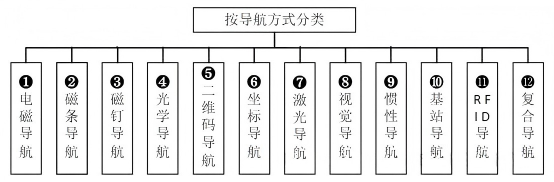
随着工业自动化与智能制造的快速发展,工业移动机器人已形成多样化的技术路线。从导航方式来看,目前常见的技术包括电磁导航、磁条导航、磁钉导航、二维码导航、光学导航、激光导航、视觉导航、惯性导航、RFID导航以及多传感器融合导航等。从驱动方式来看,可分为单轮驱动、双轮驱动以及多轮驱动结构;从底盘结构来看,则包括差速驱动结构、舵轮结构、麦克纳姆轮结构、履带结构以及车桥式结构等。
此外,根据应用功能的不同,工业移动机器人还可划分为搬运机器人、牵引机器人、装配机器人、巡检机器人、分拣机器人以及复合机器人等多个类别。随着应用场景不断拓展,各类移动机器人产品也逐渐形成具有代表性的技术体系和应用模式。
2 自主移动机器人(AMR)
2.1 AMR技术概述
自主移动机器人(AMR,Autonomous Mobile Robot)是近年来发展最快的一类工业移动机器人。与传统依赖固定路径的AGV不同,AMR具备环境感知、自主定位和动态路径规划能力,能够在复杂环境中灵活运行。
当前AMR主要应用于工业制造和智能物流领域,其核心技术路线主要包括激光SLAM和视觉SLAM两种。通过实时环境建图与定位算法,机器人能够在未知环境中实现自主导航和路径规划。
在实际应用中,由于制造业生产环境变化频繁,对系统柔性化要求较高,AMR逐渐成为智能制造场景中的主流移动机器人形式。
2.2 技术发展趋势
目前,大多数工业AMR仍以激光SLAM技术为主,其主要原因在于激光雷达在稳定性、环境适应性以及定位精度方面表现较为成熟。视觉SLAM技术虽然具有成本优势,并能够提取更多语义信息,但在复杂光照环境和纹理缺失场景下仍面临挑战。
未来的发展趋势主要体现在以下几个方面:
首先,多传感器融合将成为主流技术路线。单一传感器难以满足工业环境对可靠性的要求,因此激光雷达、视觉系统、惯性导航以及高精度定位技术将逐渐融合,形成更加稳定的导航系统。
其次,三维感知能力将进一步提升。随着3D激光雷达技术的发展,移动机器人不仅能够完成二维导航,还可以实现三维环境感知,为复杂场景中的避障、协同和智能决策提供基础。
此外,移动机器人将逐渐从室内应用拓展到室外和半室外环境,在智慧园区、智慧矿山以及智慧机场等场景中发挥重要作用。
3 叉式移动机器人

3.1 技术特点
叉式移动机器人是在传统叉车基础上融合导航系统、自动控制技术以及安全系统形成的自动化搬运设备。通过将无人驾驶技术应用于叉车平台,可以实现货物搬运、堆垛和转运的自动化操作。
近年来,随着企业对自动化物流需求不断提升,无人叉车逐渐成为工业移动机器人市场的重要组成部分。
3.2 发展趋势
在导航技术方面,SLAM导航逐渐成为无人叉车的主流技术。与传统的激光反射板导航相比,SLAM导航在部署效率和系统柔性方面具有明显优势。
在产品设计方面,一些企业开始突破传统叉车结构,通过创新底盘设计和货叉结构,开发出更加灵活的新型无人叉车。例如采用U型结构、侧叉结构或双托盘搬运结构等创新设计,以提升作业效率和空间利用率。
同时,小型化与轻量化也是叉式移动机器人发展的重要方向。这类产品体积小、灵活性高、部署简单,特别适合工厂内部短距离搬运场景。
4 箱式仓储机器人

4.1 技术概述
箱式仓储机器人系统(CTU,Container Transfer Unit)是一种应用于仓储物流领域的自动化拣选系统。该系统通常由移动机器人、货架系统、充电系统、工作站以及智能调度系统等组成。
机器人以周转箱或原箱为搬运单元,通过自主移动完成货架存取与订单拣选任务。

4.2 技术发展趋势
在导航技术方面,二维码导航仍然是箱式仓储机器人的主流方式。由于仓储环境相对固定,对路径灵活性的要求较低,因此二维码导航在成本和稳定性方面具有明显优势。
从技术创新角度来看,当前箱式仓储机器人市场已经形成较为成熟的产品体系。行业创新主要集中在以下几个方面:
一是硬件性能的持续优化,例如提升机器人运行速度、载荷能力和续航能力。
二是软件系统的不断升级,通过智能调度算法优化仓储系统整体效率。
三是系统解决方案的创新,例如与其他类型机器人协同工作,从而提升整体物流效率。
5 复合移动机器人

5.1 技术概述
复合移动机器人是一种将移动平台与机械臂相结合的智能机器人系统。该系统通常由移动底盘、机械臂、视觉系统以及末端执行器组成,能够在移动过程中完成操作任务。
这种机器人将移动能力与操作能力相结合,使其能够执行更复杂的生产任务,例如自动装配、物料分拣以及质量检测等。
5.2 发展趋势
复合移动机器人早期多采用磁导航路线,并需要额外的定位装置实现高精度操作。随着AMR技术的发展,自主导航移动底盘逐渐成为复合机器人的主流平台。
未来的发展趋势主要包括以下几个方面:
首先,控制系统将进一步融合。移动机器人和机械臂之间的协同控制将成为关键技术,未来有望通过统一控制器实现整体协调运行。
其次,多传感器融合定位技术将进一步提升机器人空间感知能力,从而提高系统整体精度和稳定性。
此外,随着人工智能、物联网和5G技术的发展,复合移动机器人将具备更强的智能化能力,实现更加灵活和高效的自动化生产。
6 重载移动机器人

6.1 技术特点
重载移动机器人通常指载荷能力超过10吨的工业移动设备,主要应用于重型制造、轨道交通、航空航天以及大型设备制造等领域。
与普通移动机器人相比,重载机器人在结构设计、动力系统和安全控制方面具有更高的技术要求。
6.2 发展趋势
随着工业自动化水平不断提升,重载移动机器人的市场需求持续增长。未来技术发展主要体现在以下几个方面:
一是更高载荷能力的发展,部分重载机器人已经开始向数百吨级载荷能力迈进。
二是更加智能化的导航技术,自然导航逐渐替代传统磁条或二维码导航方式。
三是多车协同运输技术,通过车队编组实现大型设备的高效运输。
7 半户外移动机器人

7.1 应用场景
随着移动机器人技术不断成熟,其应用范围已从室内环境逐渐扩展至半户外甚至完全户外环境。
在工业园区物流、港口码头、机场运输以及矿山巡检等场景中,移动机器人正逐渐替代传统人工运输设备。
7.2 技术发展趋势
半户外移动机器人在技术上与低速自动驾驶车辆具有高度相似性,其核心技术包括环境感知、定位导航、路径规划以及运动控制等。
未来,移动机器人将进一步与自动驾驶技术融合,通过高精度定位、视觉感知以及激光雷达技术,实现更加稳定和安全的室外运行能力。
同时,随着人工智能和通信技术的发展,移动机器人将逐步形成更加智能化的物流网络,实现更加高效的无人化运输系统。
结语

总体来看,工业移动机器人正从单一自动化设备逐渐发展为智能化协同系统。随着导航技术、人工智能以及自动驾驶技术的不断进步,未来工业移动机器人将在智能制造、智慧物流以及智慧城市等领域发挥更加重要的作用,并成为推动工业自动化升级的重要力量。