



- By YIKONG
- 2026-05-14 10:35:28
- 技术支持
亿控智能|低举升激光导引AGV系统核心技术架构与原理深度解析
引言
在汽车制造、零部件物流等高端离散制造业中,激光导引AGV已成为柔性物流运输的核心装备。一套高性能AGV不仅依赖于先进的导航与调度算法,更离不开稳定可靠的运动控制系统。亿控智能作为专业的驱动轮、电机、驱动器制造商,为AGV行业提供高精度、高响应的动力执行单元。本文基于典型低举升激光导引AGV技术方案,从系统硬件架构、定位数学原理、核心技术优势、系统功能逻辑、本体技术参数、车载器件与安全防护六大维度,进行专业技术拆解与深度延展,并在驱动与运动控制部分重点介绍亿控智能相关产品的应用价值。

一、激光导引AGV系统硬件网络架构
1.1 整体拓扑架构
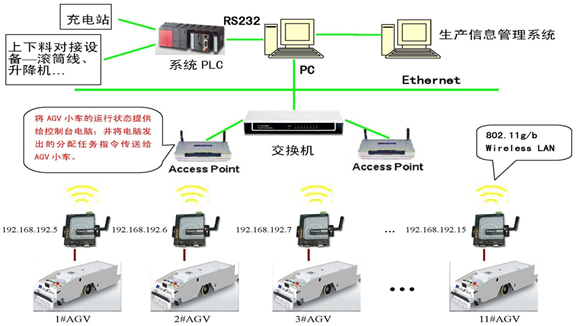
典型激光AGV系统采用分层分布式架构,自上而下划分为管理层、网络传输层、车载执行层、现场设备层四大层级,依托工业以太网与无线局域网实现全链路数据交互。
管理层:生产信息管理系统、控制台PC、系统PLC,负责任务下发、状态监控与数据存储。
网络传输层:工业以太网、无线AP(支持802.11b/g协议)、交换机,固定IP网段(如192.168.x.x),适配多台AGV组网。
车载执行层:AGV主CPU控制器、无线数据收发模块、末端控制器、激光扫描模块,以及由亿控智能提供的驱动轮、伺服电机、低压直流驱动器等运动控制核心部件。
现场设备层:充电站、上下料滚筒线、升降机等对接设备,实现物流端到端联动。
1.2 车载硬件运行逻辑
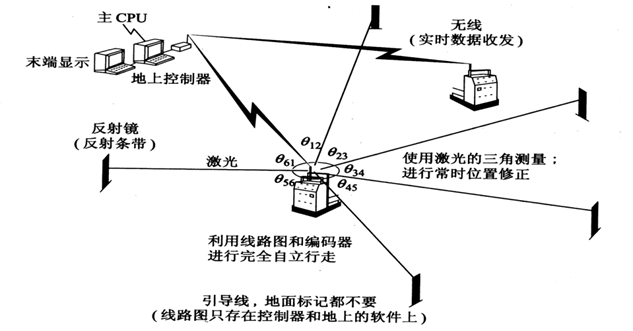
AGV车载端以主CPU为核心,集成无线实时数据收发单元;地面布置反射条带(反光板)作为定位信标,无需铺设物理引导线或地面标记。路径地图仅存储于控制器及地面软件系统中,结合激光三角测量法与编码器里程计双融合算法,实现全自主无轨行走与实时位置修正。在运动执行层面,AGV的行走与转向由亿控智能提供的高效率一体化驱动轮及配套伺服驱动器完成,确保启停平稳、速度控制精确,支撑厘米级定位精度的闭环实现。
二、激光导引AGV定位数学原理
2.1 基础定位逻辑
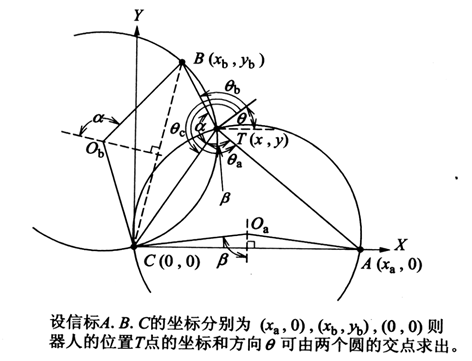
AGV搭载激光扫描器持续扫描环境,当识别到现场垂直布设的3个及以上反光板信标时,车载计算机采集反光板坐标值及其法线与车体纵向轴的夹角,解算出AGV在全局坐标系下的坐标及行驶方向偏角,完成定位与定向。
2.2 几何定位数学模型
设全局坐标系中信标 A、B、C 的坐标分别为 (x1,0)、(x2,y2)、(0,0),AGV 实时位置为 T(x,y)。通过双圆交点解析法求解位置坐标,方程组如下:
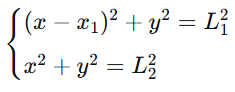
式中:L1 为 AGV 到信标 A 的直线距离,L2为 AGV 到信标 C 的直线距离。联立方程可唯一解算 T 点坐标与航向角,实现厘米级精确定位。
2.3 动态位置校正机制
系统以 50 ms/次的频率进行连续坐标计算与即时校正,颠覆传统导引方式“数米分段盲走、间歇校正”的模式。同时融合激光定位数据与车轮编码器里程数据,实时补偿车体滑移、地面颠簸带来的位置偏差。其中,编码器数据的准确性与驱动轮的设计制造密切相关。亿控智能的驱动轮集成高分辨率编码器,与驱动器形成闭环控制,为位置校正提供精确的里程信息,保障长时间连续运行精度稳定。
三、激光导引AGV核心技术优势
3.1 技术先进性
超高定位精度:重复定位精度达 ±5 mm,满足汽车总装、焊装等高精密对接工况。这一精度的实现离不开高动态响应的驱动与伺服系统,亿控智能的低压大电流驱动器具备高带宽电流环与速度环,有效抑制速度波动,提升定位稳定性。
无线通信抗干扰:采用 802.11b/g 无线局域网通信,带宽充足,抗工业现场电磁干扰能力强,支持多台AGV并发通信。
模块化车载控制器:硬件模块化设计,故障断点可快速定位、拆解维修,降低设备运维停机时间。
路径软件重构:无需现场施工,仅通过后台计算机即可完成路径增删、改道及站点重新规划,适配产线工艺改造。
多机协同防拥堵:支持复杂交叉路径与环线路径规划,克服有线导引单一路线局限,通过交通调度算法规避多车阻塞。
3.2 部署灵活性
仅需布设反光板定位信标,无需地面开槽、铺设线缆等基建工程;设备扩容、工位重组可快速落地,运行路线及取卸货站点支持柔性调整,适配多品种混线生产模式。
3.3 工程经济性
省去导引线铺设工程量,大幅降低初期基建成本;后期布局调整无需停产改造,减少生产中断损失;模块化硬件与标准化软件架构,降低了全生命周期运维成本。在驱动部件层面,亿控智能提供标准化的驱动轮模组与通用驱动器接口,方便AGV厂商快速集成与维护,进一步降低全生命周期成本。
四、激光AGV系统核心功能模块
4.1 智能调度管理功能
任务优化调度:按任务时间顺序、优先级权重自动排序,高优先级物流任务优先分配执行。
车辆智能匹配:实时采集各AGV位置、电量、工作状态,就近调度空闲车辆响应任务,缩短物流响应时延。
多机交通管制:全域实时管控多台AGV行驶状态,实现交叉路口避让、同向车距保持、阻塞自动解堵。
双链路通信:有线以太网对接上层物流管理机,无线局域网下发AGV作业指令、回传任务执行状态。
4.2 设备控制管理功能
全流程监控AGV任务执行进度,实时查询单车运行状态、故障代码。
采集路网节点、路段占用信息,动态更新交通管制状态。
实时监测系统通讯链路,自动识别通信中断、信号异常。
内置阻塞消解算法,自动处理多车交汇、窄通道拥堵场景。
4.3 全动态图形监控功能
实时可视化:动态展示AGV位置、运行轨迹,同步反馈正常运行、等待充电、手动模式、急停、路径阻塞、设备离线等全状态。
权限分级管理:支持自定义用户组与操作权限,管控监控、任务下发、参数修改等操作。
事件日志与报表:自动记录任务日志、故障日志、报警事件,支持按时间段、事件类型筛选导出。
应急任务下发:图形界面可手动下达临时搬运任务,适配产线应急物流需求。
智能事件报警:实时推送充电超时、车辆阻塞、AGV离线、站点地址无效等告警,支持过滤器精准筛选。
4.4 路径与站点柔性变更
支持运行路径轨迹编辑、取卸货站点位移调整、站台功能参数修改,所有配置在线生效,无需停机调试,适配产线工位调整、物流路线优化场景。
4.5 全自动智能充电功能
采用侧置式自动快速充电模式,内置电量阈值触发机制:
当电池容量降至设定下限,AGV主动向上位系统发送充电请求。
调度系统匹配空闲充电站,规划最优充电路径,引导AGV精准停靠充电位。
自动吸合充电接触器启动充电,充满后自动断开,重返作业任务。
充电站待机休眠设计,仅AGV精准对位后导通供电,节能且延长设备寿命,充放电时间配比达1:8。
五、低举升AGV本体核心技术参数

以行业标杆林德 L14/L16 低举升激光AGV为基准,核心性能指标如下。其驱动方式为前轮驱动兼转向(SD型)。在该类AGV中,驱动轮单元是关键执行部件。亿控智能可提供适配该级别AGV的卧式或立式驱动轮,集成伺服电机与高精度编码器,最大输出扭矩满足满载爬坡9%的要求,且支持24V/48V电压平台,与AGV电池系统(24V/190Ah)直接匹配。
六、车载核心器件与安全防护技术
6.1 NAV激光导航系统
搭载 SICK NAV350 激光导航模块,核心技术特性:
最远检测距离达 70 m,低反射率环境下有效测距 35 m。
支持“反光胶贴定位 + 环境轮廓混合导航”,无反光板区域亦可自主运行。
高精度采集环境距离、角度、反射率数据,内置算法自主完成数据分析,降低车载控制器算力负荷。
支持参数在线修改与环境轮廓自学习,适配复杂车间工况。
6.2 二级激光安全防护

采用双级分区安全监测,软件可自定义 4 组监测区域:
减速区:前方最大 4 m 可调,障碍物闯入后 AGV 自动减速运行。
停止区:前方最大 3 m、后方最大 1 m 可调,障碍物闯入立即急停。
冗余安全设计:前端配置接触式安全环,当激光装置失效或低矮障碍物无法探测时,物理触碰即刻停车,构建双重安全屏障。
6.3 运动控制核心部件(亿控智能)
AGV的精确运动控制由亿控智能提供的一体化驱动轮及智能驱动器实现:
一体化驱动轮:将伺服电机、减速机、编码器、轮体高度集成,结构紧凑,便于AGV底盘布局。轮体材质可选聚氨酯或橡胶,适应不同地面条件。
低压伺服驱动器:支持24V/48V直流供电,峰值电流可达200A以上,具备CANopen、EtherCAT等工业总线接口,方便与AGV主控制器实时通信。驱动器内置位置、速度、扭矩三种控制模式,支持平滑加减速控制,确保AGV启停无冲击。
电机:采用高效率永磁同步电机,转矩脉动小,配合高分辨率编码器(17位以上),速度控制精度可达±0.1%,为AGV重复定位精度±5mm提供基础保障。
6.4 状态报警与操作模式
状态指示:自动运行指示灯常亮、手动模式指示灯闪烁,状态直观可视化。
运行声光报警:集成进口闪光警灯与转向指示灯,转弯单边闪烁,倒车、载货、故障时双边同步报警。
三重控制模式:支持手动、半自动、全自动三种运行模式,可通过现场按钮、上位机、车载面板三种方式调度作业,适配调试、常规生产、应急作业全场景。
结语
低举升激光导引AGV系统融合激光三角定位算法、无线组网通信、多机智能调度与二级安全防护等核心技术,实现了无轨化、高精度、柔性化的物流输送。作为AGV核心运动控制部件的供应商,亿控智能专注于驱动轮、电机、驱动器的研发与制造,为AGV行业提供高可靠性、高集成度的动力单元。通过持续优化电机控制算法与轮系设计,亿控智能助力AGV实现更平稳的运行、更精准的定位以及更低的能耗,共同推动工业物流向无人化、智能化升级。