



- By YIKONG
- 2026-05-12 10:05:11
- 技术支持
亿控智能|制造业产线物料配送:AGV路径优化与交通管理怎么做才不堵
在智能制造和柔性生产逐步推进的背景下,AGV已经从“可选项”变成了很多工厂的基础配置。尤其是在物料配送环节,用AGV替代人工搬运,正在成为越来越多产线的标准方案。
但不少企业在实际落地之后会发现一个比较现实的问题:设备上线了,但效率不一定同步提升。高峰时段出现拥堵、等待,甚至局部“卡死”,反而影响了整体节拍。
问题的关键在于,系统从“单车运行”变成了“多车协同”。以前关注的是一辆车怎么走最快,现在要解决的是多台车在有限空间内如何同时运行而不互相干扰。

一、多车运行后,问题是如何逐步出现的
在早期应用阶段,AGV通常用于固定路线的点对点搬运,比如从仓库到产线,路径简单、节奏稳定,这类场景很少出现问题。
随着产线节拍提升、SKU增加,多台AGV开始在同一区域频繁交叉运行,一些典型问题会逐步暴露出来:
路口拥堵:多台车同时到达交叉节点,频繁等待 对向死锁:窄通道迎面相遇,系统无法有效决策 路径失衡:部分通道长期高负载,其它路径利用率偏低
这些问题表面上看是调度问题,本质上是路径规划缺乏全局约束,同时交通规则不够清晰。
二、路径优化怎么做,关键在于分层
在实际项目中,如果一开始就追求复杂算法,往往很难落地。更有效的方式,是把路径优化拆分成几个层次,从静态到动态逐步完善。
首先是基础建模和静态路径规划。需要把车间抽象为由节点和路径组成的拓扑结构,例如工位、缓存区、充电位作为节点,通道作为连接关系。对于上料、空托回收这类高频任务,可以提前规划出多条备选路径,并设置优先级。这里常用的算法如A*或Dijkstra已经足够,关键在于路径是否提前设计合理。
在系统运行之后,仅依赖静态路径是不够的。现场环境是动态变化的,因此需要引入时间维度,对路径占用进行预测。当系统判断某段路径即将发生冲突时,可以进行局部重规划,让车辆绕行,从而减少等待时间。
对于无法绕开的瓶颈区域,则需要引入路径占用控制机制,也就是常说的时间窗或路径锁。简单来说,就是在某一时间段内,这段路径只允许一台车通过,其它车辆必须在入口等待。
在这一层的工程实现中,核心能力往往不仅取决于算法,还取决于车辆执行层的稳定性。例如在一些项目中,像亿控智能提供的AGV驱动轮与驱动器一体化方案,更多承担的是“执行可靠性”的基础角色——包括启停平稳性、低速控制精度以及负载下的稳定输出,这些都会直接影响多车系统在拥堵场景中的表现。
冲突处理方面,也建议区分不同类型分别处理,而不是统一规则。例如:
节点冲突:通过优先级机制决定通行顺序 对向冲突:通过关键区域占用判断先后 同向冲突:通过车距控制和动态限速避免追尾
三、交通管理设计,往往比算法更关键
很多项目在路径算法上投入了不少精力,但上线之后依然容易出现拥堵,原因往往在于交通管理规则没有设计清楚。
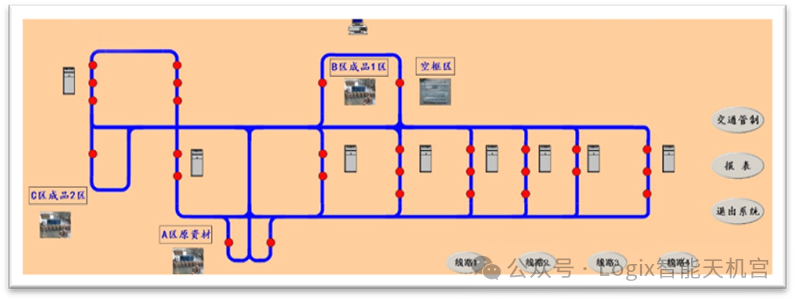
从实际经验来看,车间进行合理的区域划分非常重要。将原料区、加工区、成品区等划分开,可以对车辆流动形成基本约束,避免局部过载。如果产线密度较高,采用单向环形路线通常更稳,可以从结构上减少对向冲突。
在关键交叉口或狭窄通道,建立明确的通行规则也很有必要,例如:
同一时间只允许一个方向通行 主通道优先,支路车辆让行 紧急任务可获得更高通行优先级
此外,避让空间的预留也非常关键。如果通道之间没有缓冲区域,一旦局部出现拥堵,很容易向后扩散。在规划阶段适当增加避让区或待命区,可以让系统在拥堵发生前进行分流。
从工程落地角度看,除了上层调度策略之外,车辆本身的执行能力也会影响整体流畅度。例如驱动轮的低速稳定性、驱动器的响应一致性,在多车同步运行时会放大差异,这也是为什么很多整车方案厂商会把底盘执行系统作为重点能力来设计。
四、实施过程中几个容易被忽略的问题
在项目推进过程中,有些问题往往不是设计阶段最关注的,但对最终效果影响很大。

1. 过度追求最短路径,反而容易形成拥堵最短路径通常也是使用最频繁的路径。适当让一部分车辆绕行,虽然单车路径略有增加,但整体系统通行效率往往更高。
2. 上线前缺少仿真验证,后期调整成本很高在系统正式运行前,建议通过仿真工具提前验证高峰场景,例如AnyLogic 或 Siemens Plant Simulation
重点关注死锁风险、最长等待时间以及拥堵后的恢复能力。
3. 可视化与数据系统建议分阶段推进系统初期不必一开始就做复杂数字化平台。更实际的做法是先实现基础可视化,例如车辆位置、任务状态和通道占用情况,再逐步扩展到热力图、利用率分析等能力。
4. 人机混行需要提前纳入设计完全无人化在大多数工厂中并不现实,因此需要考虑人机协同,例如车辆检测到人员时自动降速、声光提醒,以及关键区域预留人工通道。
5. 系统架构建议采用集中调度路径规划和调度决策更适合在上位系统统一处理,而不是分散在各台AGV上执行。常见方式是“集中调度 + 分布执行”,上位系统负责全局优化,车辆本体负责执行指令和基础避障。
结语
从实际项目经验来看,AGV系统能否稳定运行,并不取决于某一个算法是否先进,而更多取决于整体规则是否清晰、底层执行是否可靠。
路径优化解决的是“怎么走”,而交通管理决定的是“能不能一直顺畅地走”。同时,像驱动轮、驱动器这类底层执行单元的稳定性,也会在多车系统中被不断放大,最终影响整体运行效果。

当系统设计、交通规则与底层执行能力三者协同,多车AGV系统才能真正发挥效率优势。