



- By YIKONG
- 2026-04-29 10:33:36
- 技术支持
亿控智能|从感知到执行:无人叉车关键技术拆解与国产核心驱动实践
智慧物流正从试点探索阶段全面迈入产线级部署,无人叉车作为连接各工序的柔性搬运核心,已在汽车装配、密集仓储等场景中扮演不可替代的角色。本文从系统组成、主流导航算法、实际运行风险及国产核心驱动等维度,对无人叉车进行体系化拆解,为制造与物流领域的工程技术人员提供参考。

一、行业需求与技术演进
高效率、低成本、零伤害是制造业物流长期追求的目标。传统叉车完全依赖驾驶员的主观经验来控车,存在响应滞后、作业一致性差、人力成本攀升等问题,尤其是在节拍紧凑的多车型混线车间,人工叉车的调度瓶颈直接拖慢生产进度。随着电控平台、环境感知与实时计算技术的成熟,无人叉车通过将人工操控逻辑转化为自动决策与控制指令,显著提升了设备综合效率与物流稳定性,成为柔性制造体系中不可缺少的一环。

二、系统构成与核心模块
无人叉车本质上是一个集成环境感知、自主决策、运动执行和安全保障的移动机器人。其关键子系统包括:
环境感知与定位模块:通过激光雷达、编码器等传感器获取车辆位姿与周围物体信息,是整车自主性的根本。
决策控制单元:解析调度系统下发的任务,融合感知数据,计算局部路径并生成运动指令。
冗余操控接口:保留人工操作通道,以便在调试、异常恢复或紧急情况下接管车辆控制。
多级安全防护体系:利用非接触式传感器(如安全激光扫描仪、超声波阵列)与物理接触开关构建区域避障与急停机制,防止碰撞。
需要特别指出,无人叉车的前提是线控底盘——全电转向、电比例举升及电驱动行走,传统以内燃机为动力的叉车缺少相应的电控接口,不具备无人化改造的先天条件。
目前产业界采用的导航方案主要包括:基于人工信标的反光板激光定位、自然轮廓匹配的激光SLAM、视觉语义导航,以及融合惯性测量单元等的复合导航。方案选型直接决定了现场改造工作量、长期精度保持能力与场景迁移的灵活性。
三、典型导航技术原理
3.1 基于反光信标的激光定位
该方式要求在运行通道两侧布置若干具有高反射率的人工标记(反光板),车体顶部安装的旋转激光扫描仪以固定频率获取周围反光板的角位置,并根据反射强度信息将其从背景中分离。当至少检测到三块有效反光板时,即可利用几何关系解算车辆位姿。
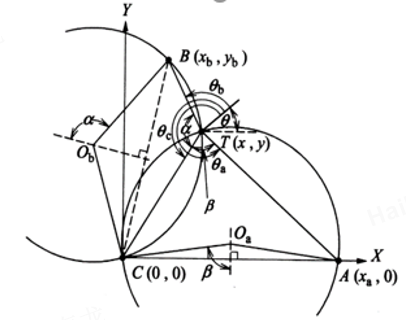
位姿解算模型设已知三块反光板在全局坐标系下的坐标分别为 A(xa,ya)、B(xb,yb)、C(0,0),激光测出的车辆与各点距离依次为 dA,dB,dC,车辆当前坐标 (x,y) 满足:
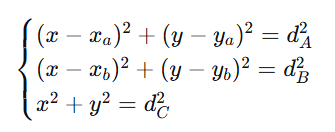
联立求解即得位置,通过相邻两个时刻位置差分可推算航向角 θ=atan2(Δy,Δx),从而实现动态路径跟随。
方案特点
重复定位精度可达 ±5 mm 级别,满足高精度堆垛诉求。
反光板安装与全局坐标标定工作量大,作业区域调整时需重新布点,灵活性受限。
定位不受普通货物堆放遮挡的影响,但反光板表面需保持洁净,灰尘、油污会大幅削弱回波强度。
3.2 自然环境激光SLAM
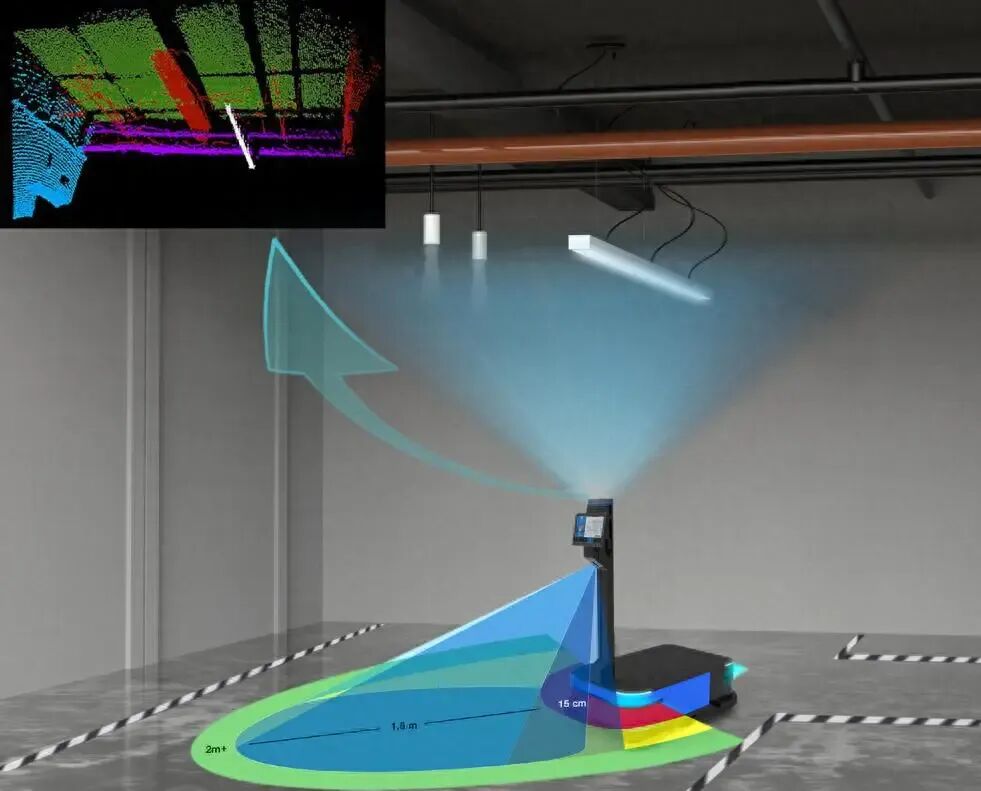
激光SLAM方案免去了人工标记物,通过提取仓间立柱、墙面、高位横梁等静态几何特征,利用帧间扫描匹配与回环闭合算法构建环境特征图,并据此进行实时自定位。
实施过程分为两个阶段:
建图阶段:由操作员驾驶车辆遍历所有作业路线,车载控制器基于激光点云与里程计数据生成占据栅格地图,并提取鲁棒特征存入数据库。
在线运行阶段:车辆将实时激光扫描与建图特征进行关联匹配,得到当前位姿,随后结合全局代价地图规划最优行驶路径。
方案特点
现场无任何附加设施改造,部署便捷,适合频繁调整布局的仓库。
在特征贫乏(如长直空旷走廊)或动态物体密集的场景中,位姿估计可能出现退化。
对嵌入式计算平台的实时点云配准能力和内存占用有较高要求,但正常使用后维护成本低于有反方案。
四、实际应用中的挑战与应对
经过多年发展,无人叉车基础功能已相当完善,但要在复杂严苛的产线物流中稳定运行,仍需正视以下工程难题:
1. 堆垛对接容差与车辆失稳风险地面不平整、轮径磨损差异及长时间运行引起的里程漂移会累积位姿偏差。当叉具进入托盘插孔或料架定位槽时,若横向/角度偏差超出结构容限,将发生机械碰撞,重载工况下甚至引起车身倾斜或倾覆。必须通过高频外部位置校准与伺服纠偏算法降低此类风险。
2. 物流容器状态自检缺失目前大多数无人叉车仅能完成点到点的搬运,缺乏对托盘等载具自身完好性的感知。例如木质托盘断裂、钢制料架变形、包装箱底塌陷等,如果系统无法提前识别这些缺陷,叉具伸入过程可能发生货物脱落或载具崩塌,带来安全隐患与财物损失。
3. 恶劣工况下的传感器失效高浓度粉尘、焊接烟尘、水雾等会对激光雷达发射的脉冲形成强烈衰减和杂波干扰,导致有效回波数量不足;室外转运区反光板也常因积灰、结露而反射率降低,引发定位跳变甚至完全丢失。这一问题的解决有赖于多传感互补(如毫米波雷达、惯性导航)及防护等级提升。
4. 运行中货物位姿变化的检测盲区急加速、紧急制动或过弯时,货物可能相对叉臂发生滑移、旋转或倾倒,多件货物之间也可能因粘连而一起被叉取。没有实时的货物位姿检测与调整机制,极易造成卸载对位不准、货物掉道等异常,影响整线物料流的顺畅性。

五、融合创新与核心部件国产化
未来无人叉车的发展将围绕“更高精度、更强鲁棒、更广适用性”展开,技术演进集中体现在三个方面:
多模态传感融合定位:将激光SLAM、视觉VSLAM与惯性导航紧密耦合,利用各自在不同场景下的优势提高动态环境定位稳定性。
AI赋能环境感知:通过深度学习实现托盘完整性检测、货物姿态估计和料架变形预警,将异常工况识别提前至动作执行之前。
仿真驱动的智慧部署:借助高保真数字孪生优化车群调度规则与单车轨迹,减少现场试错投入。
在这些上层智能系统不断进步的同时,底层运动执行部件的性能同样决定了整车能力的上限。国内一批核心部件企业正在快速填补高端驱动市场空白,其中江苏亿控智能装备有限公司推出的 TEC230 立式舵轮,额定承载达到 1.5 吨,专门针对 AGV 叉车类需求开发。该舵轮采用一体化立式集成设计,兼具高回转精度与长寿命特性,可充分满足窄通道高位堆垛、重载搬运等工况对精准驱动和稳定行走的严苛要求,为无人叉车的整车性能提升提供了可靠的本土化驱动解决方案。

六、结语
无人叉车的规模化导入不是单纯的设备替代,而是一场涉及工艺适配、数据积累、供应商协同的系统工程。制造企业和方案商应基于自身物料形态、节拍特点和场地约束,科学地选择导航技术路线,匹配合适的核心驱动与感知模块,并在反复迭代中打磨出真正贴合生产需求的智慧物流系统。