



- By YIKONG
- 2026-06-10 10:21:47
- 技术支持
亿控智能|轮式人形机器人:制造物流场景下的核心技术体系与工程落地深度解析
摘要轮式人形机器人作为具身智能在工业领域率先落地的技术形态,融合了AGV/AMR的高效移动能力与人形机械臂的灵巧操作能力,精准适配制造与仓储物流中非完全结构化作业环境。本文基于产业技术研究成果,从纯技术视角拆解其定义、演进逻辑、三大核心技术架构、关键零部件原理、运动控制模型及落地应用要点,面向技术研发、工程集成与现场运维专业人员,深入剖析技术细节与迭代方向。

一、轮式人形机器人技术定义与形态架构
1.1 标准技术定义
轮式人形机器人是一类采用“上半身拟人执行机构 + 下半身轮式移动底盘”的复合机器人系统,本质上是移动机器人与人形操作机构的深度机电一体化集成。其设计目标在于:在保证移动效率与作业稳定性的前提下,兼顾多自由度灵巧操作能力,实现移动–操作一体化作业。
按照技术构型,当前主流产品分为两类:
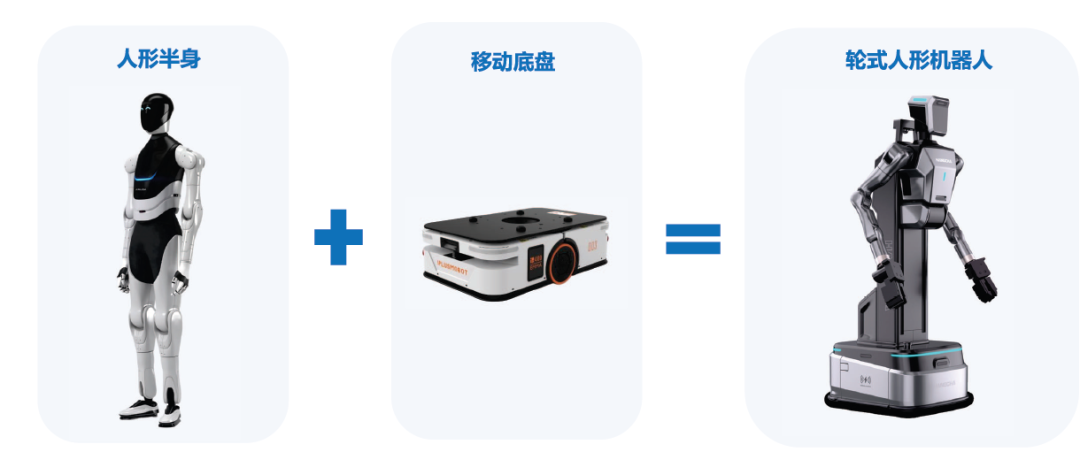
轮式底盘 + 拟人半身结构:无升降机构,底盘与上身刚性连接,重心固定,适用于平面仓储与产线转运场景;
轮式底盘 + 升降台复合结构:集成直线升降模组,作业高度可调,适配多层高货架、多工位产线交互场景。
1.2 工程维度的核心优势
相较于双足人形机器人、传统AGV及固定机械臂,轮式方案在制造物流场景中具备三大工程优势:
动态稳定性:依托轮式底盘的静态支撑结构,无需复杂动态平衡控制算法,系统稳态误差低,满足工业连续运行要求;
能耗与续航:轮式运动以滚动摩擦为主,同等负载下能耗较双足行走降低50%以上,支持长时连续作业;
硬件复杂度:省去双足腿部多组高负载关节与液压/伺服驱动单元,运动链自由度总量减少约40%,机械故障率与硬件成本显著下降。
1.3 技术演进路径
从工业机器人技术迭代视角看,轮式人形机器人遵循“单点执行 → 独立移动 → 移动+操作融合”的演进路线:

固定机械臂阶段:仅具备空间定点操作能力,受机械臂工作半径限制;
AGV/AMR自主移动阶段:解决平面自主导航与物料转运,无主动操作能力;
复合机器人阶段:底盘与机械臂简单集成,运动与操作独立控制,协同性较差;
轮式人形机器人阶段:机电、算法、感知全栈融合,实现移动过程中同步完成抓取、分拣、巡检等动态作业。
当前,轮式人形机器人整体处于技术成长期,头部产品已完成千台级量产验证,核心技术迭代聚焦于多机协同、动态力控与模型轻量化三大方向。
二、整体技术体系:大脑、小脑、肢体三层架构
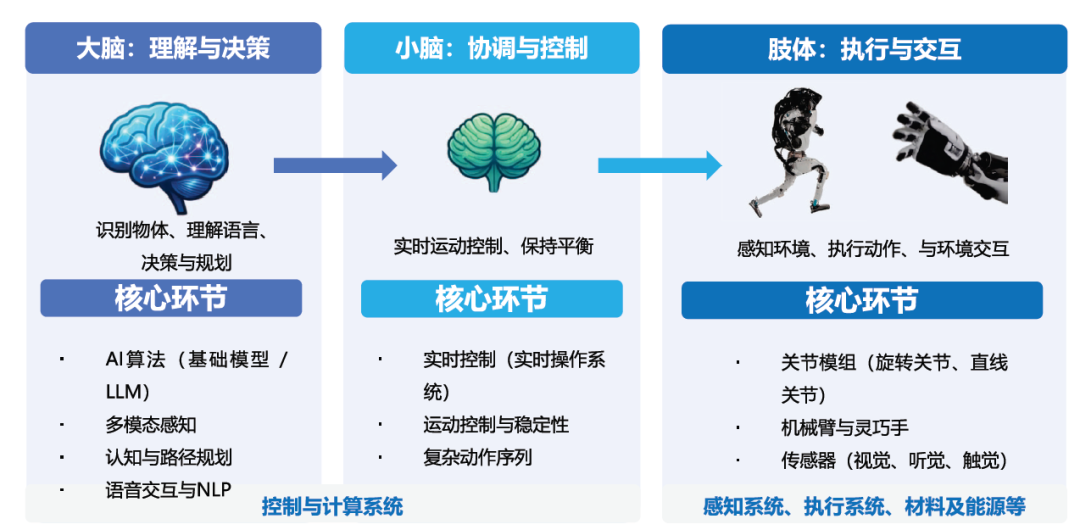
轮式人形机器人的完整技术体系可类比生物躯体,划分为环境感知与智能决策(大脑)、运动控制与协同(小脑)、核心零部件与执行机构(肢体)三大层级,三者深度耦合,共同决定整机性能。
2.1 大脑:环境感知与智能决策系统
感知决策系统是整机的算力与逻辑核心,负责环境建模、指令解析与任务规划,是具身智能的核心载体。
2.1.1 多模态大模型技术栈
当前主流技术路线采用 VLM(视觉语言模型)+ VLA(视觉语言动作模型) 双模型架构:
VLM:实现视觉图像与自然语言的双向映射,完成物体识别、场景理解与指令解析。在物流分拣中,可解析“分拣不合格料箱”“抓取左侧周转筐”等指令,识别准确率达95%以上。
VLA:打通感知–决策–动作端到端闭环,将视觉与语言信息直接转化为动作序列。工业场景要求单帧推理时延低于50ms。
技术演进方向包括:模型轻量化裁剪以适配边缘算力、跨场景迁移学习优化、以及VLM与VLA的深度融合以取消中间解析环节。
2.1.2 SLAM技术
SLAM是轮式机器人自主导航的基础,当前已完成从单一激光SLAM向多传感器融合SLAM的迭代:
原理:在未知环境中实时解算自身位姿,同时增量构建环境栅格地图;
常用传感器组合:2D/3D激光雷达 + 深度相机 + IMU;
指标:工业仓储定位要求绝对误差≤±1cm,动态环境下地图更新频率≥10Hz。
迭代趋势:融合数字孪生仿真SLAM,在虚拟场景中完成路径预规划与障碍物推演。
2.1.3 3D视觉感知与语义识别
基于深度相机采集三维点云,结合AI图像分割算法,实现障碍物分类与风险分级:
区分通行区域、静态障碍物、动态行人/设备,输出避障路径;
语义级识别(人员、货箱、线缆、货架等),划分风险等级,执行差异化避障策略;
优化难点在于强光、反光、遮挡等工业复杂工况下的算法鲁棒性。
2.2 小脑:运动控制与协同系统
运动控制系统负责底盘移动、机械臂动作及整机重心协同调节,是保障作业精度与稳定性的核心单元。
2.2.1 轮式底盘运动控制模型
主流驱动方式分为差速驱动与全向驱动(麦克纳姆轮)两类:
差速驱动:结构简单、负载能力强,适用于重载仓储场景。运动学方程基于左右轮转速与几何参数解算位姿。
全向驱动:可实现原地自旋与横移,适用于窄通道、密集货架场景,速度解算依赖轮组转速与机体速度的矩阵映射。
底盘控制优化方向包括:阶跃指令响应时间≤100ms、地面自适应算法(地坪缝隙、轻微坡度)、以及移动中操作协同控制。
2.2.2 上身操作控制技术
多自由度机械臂+末端执行器的控制分为位置控制与力/位混合控制:
轨迹规划:采用五次多项式插值,保证启停平滑、降低冲击;
力/位混合控制:针对易碎品或精密装配,同时约束末端位置与接触力;
躯干协同:机械臂大角度作业时,躯干旋转配合调整重心,避免侧翻。
2.2.3 主流控制架构
行业普遍采用基于模型的控制 + 强化学习的混合架构:前者保证运动精度与轨迹重复性,后者提升环境自适应能力,共同兼顾高精度与高适应性。
2.3 肢体:核心零部件与执行机构
执行机构与核心零部件决定负载、精度、寿命与防护等级,涵盖轮式底盘、上身执行、传感与能源系统。
2.3.1 驱动与传动部件
伺服电机:底盘采用低压伺服或轮毂电机,要求大扭矩、高过载、IP54以上防护;上身关节采用空心杯电机或无框力矩电机,追求高功率密度与轻量化。
减速器:重载关节(肩、腰、底盘)使用行星减速器或蜗轮蜗杆;精密关节(腕、手部)使用谐波减速器,要求背隙小、传动效率≥85%。
2.3.2 末端执行机构
物流场景中,末端执行器分为:刚性夹爪(标准料箱)、柔性夹爪/仿生灵巧手(异形或易碎品)、真空吸盘(纸箱/板材)。
2.3.3 传感器与能源系统
传感器集群:2D/3D相机、激光雷达、六维力传感器、扭矩传感器、IMU。
能源系统:锂电池组+BMS,要求续航≥8小时/单班,循环寿命≥1500次。
零部件整体演进趋势为集成化、模块化与国产化。
三、产业链核心技术环节拆解
3.1 上游:核心零部件技术壁垒
上游零部件占整机成本的60%以上,是技术壁垒最高的环节:
算力芯片与控制器:边缘AI芯片负责视觉与大模型推理,运动控制器实现伺服闭环。亿控智能在运动控制器与多机协同调度方面已推出具备自主知识产权的产品,在中低速场景下实现了对进口方案的有效替代。
精密传动件:谐波减速器、高精密伺服电机国内已实现量产,性能逐步对标国际。

高端传感器:六维力传感器、高精度3D激光雷达国产化正在提速。
3.2 中游:整机集成与制造
中游主要涉及本体设计、集成装配与测试调试。三大集成模式包括:外购成熟底盘+自研上身、全栈自研、模块化部件快速装配。工程测试要点涵盖振动、负载循环、高低温及连续运行可靠性(MTBF≥2000h)。
3.3 下游:制造物流场景技术适配要求
3.3.1 仓储物流场景

物料搬运:负载范围10~100kg,平面速度≤1.5m/s,重载底盘控制与多机集群调度是关键。
智能分拣:3D视觉快速识别、柔性抓取,分拣准确率≥99.5%,动态力控避免破损。
库存盘点:自主遍历导航、条码/RFID识别精度≥99.9%,升降模组定位精度±2mm。
3.3.2 工业制造场景
产线上下料:重复定位误差≤±0.5mm;
设备巡检:多传感器融合检测,图像识别缺陷与仪表读数;
高危工位替代:防尘、防油、防爆设计,防护等级IP54以上。
四、技术发展趋势与工程优化方向
4.1 算法趋势
大模型深度轻量化,支持单机本地推理;
数字孪生+虚实融合训练,降低真实场景试错成本;
多机协同调度算法,实现数十台机器人的动态任务分配与路径防冲突。
4.2 硬件趋势
机电一体化融合,打破“底盘+机械臂”分体设计;
模块化标准化接口,实现快速替换与运维;
核心零部件规模化量产,推动整机成本下行。
4.3 控制技术优化方向
移动–操作深度协同:摒弃“停稳再操作”模式,实现高速移动中同步作业;
自适应力控普及:全场景力控算法落地;
故障自诊断技术:基于运行数据预判电机、减速器、传感器故障,提升运维效率。
五、总结
轮式人形机器人是AGV/AMR移动技术与人形操作技术融合的产物,凭借技术成熟度、成本与稳定性三大优势,成为制造物流领域具身智能落地的首选形态。从技术底层看,其竞争力取决于三层架构的综合性能:感知决策层的大模型与SLAM鲁棒性、运动控制层的多自由度协同与力控精度、执行机构层的零部件可靠性与集成能力。诸如亿控智能等企业在运动控制、多机协同及整机标定领域的技术积累,正加速这一形态从样机到规模化应用的工程转化。
未来3~5年,行业技术竞争将聚焦于模型轻量化、机电一体化、集群协同与成本优化四大方向。对于制造物流行业而言,轮式人形机器人将逐步替代传统人工与单一功能机器人,成为柔性智能物流与自动化产线的核心装备。