



- By YIKONG
- 2026-06-04 08:55:31
- 技术支持
亿控智能|双轮差速驱动轮AGV扭矩与惯量选型完整工程指南
一、前言
在AGV与AMR移动机器人系统中,驱动电机选型直接决定整车性能上限,包括加速能力、爬坡能力、转向灵活性以及长期运行稳定性。
但在实际工程项目中,驱动系统设计常常存在一个典型问题:仅依据整车重量或经验功率进行选型,而忽略了不同运行工况下的真实力学需求。
对于双轮差动AGV(Differential Drive AGV)而言,驱动系统至少需要同时满足三种极限工况:
· 直线加速运行
· 圆弧转弯运行
· 原地旋转工况
其中,原地旋转通常是扭矩需求最大的状态,也是决定电机规格的关键工况。
因此,一个可靠的驱动系统设计,必须基于完整的力学模型,而不是经验估算。
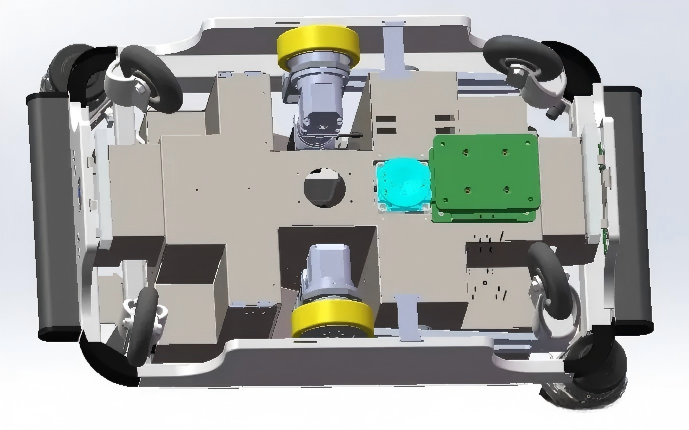
二、AGV驱动系统的基础力学模型
.jpg)
AGV在实际运行过程中,驱动电机需要克服的阻力主要来自三个部分:滚动阻力、加速惯性阻力以及坡道阻力。
1)滚动阻力
滚动阻力来自万向轮与地面的接触变形,其大小与载荷及地面条件直接相关:
F_r = (m − m_drive) × g × μ
其中:
· m 为整车满载质量
· m_drive 为驱动轮承载部分
· μ 为滚动阻力系数
2)加速阻力
AGV在启动或加速过程中,需要克服整车惯性:
F_a = m × a
加速度越大,对电机瞬态扭矩要求越高,这在高速AMR系统中尤为明显。
3)坡道阻力
当AGV存在爬坡需求时,还需考虑重力沿坡面的分量:
F_g = m × g × sinθ
在平地运行时该项为0,但工程设计中必须保留安全裕量。
4)总运行阻力
因此,AGV的总驱动力可以统一表示为:
F_total = F_r + F_a + F_g
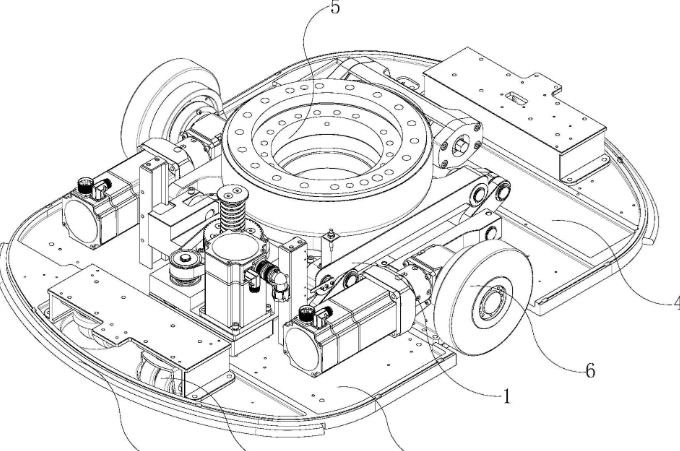
三、直线运行工况扭矩计算
.webp)
在直线运行状态下,双轮差动AGV左右驱动轮对称受力,此时系统处于最稳定的运行模式。
单个驱动轮承担的驱动力为:
F_straight = F_total ÷ 2
对应驱动轮输出扭矩为:
T_straight = F_straight × (D ÷ 2)
其中 D 为驱动轮直径。
这一工况通常用于基础扭矩校核,用来验证电机是否具备持续输出能力。
四、原地旋转工况(关键设计工况)
对于双轮差动AGV而言,原地旋转是最苛刻的工况之一。
在该模式下:
· 左右驱动轮反向旋转
· 车体绕几何中心旋转
· 四个万向轮产生最大偏角
· 阻力被几何结构显著放大
此时等效驱动力可近似表示为:
F_spin ≈ (2 × F_roll × √(W² + L²)) ÷ W
其中 W 为驱动轮间距,L 为车体长度。
驱动轮扭矩为:
T_spin = F_spin × (D ÷ 2)
工程结论
在绝大多数实际AGV项目中:
原地旋转扭矩通常是直线工况的 2~5倍
因此在电机选型中,必须优先以该工况作为控制约束,否则极易出现:
· 原地转不动
· 起步卡顿
· 电机过载保护
· 减速机冲击过大
五、圆弧转弯工况(实际最常用运行状态)
在真实路径规划中,AGV大部分时间处于圆弧轨迹运行状态。
该工况特点为:
· 左右轮存在速度差
· 万向轮产生中等偏角
· 阻力介于直线与原地旋转之间
工程上通常满足以下关系:
T_straight < T_arc < T_spin
因此圆弧工况通常不作为极限选型依据,但用于验证系统运行平稳性与控制稳定性。
六、驱动系统选型的工程结论
综合三种工况分析,双轮差动AGV的驱动电机选型应遵循以下原则:
首先,以原地旋转工况作为扭矩设计上限,其次校核直线运行的持续能力,并验证圆弧工况下的控制稳定性。
在此基础上,还需预留20%~50%的工程安全余量,以应对地面变化、负载偏移以及长期运行带来的性能衰减。
七、TEC系列差速驱动轮的工程应用
在实际AGV项目中,驱动系统通常需要同时满足:
· 高扭矩输出能力
· 高惯量匹配稳定性
· 长时间连续运行可靠性
· 紧凑结构集成需求
亿控智能推出的 TEC 系列差速驱动轮,将低压伺服电机、精密减速机构与工业级驱动轮集成为一体,适用于多种移动机器人应用场景。
.png)
其中 TEC85、TEC240、TEC550 等型号可覆盖从中小型AMR到重载AGV的不同需求,并支持不同减速比、编码器反馈及制动系统配置。
在工程设计中,可基于本文计算得到的扭矩结果,结合 TEC 系列的实际输出能力进行匹配,从而缩短整车开发周期并提升系统可靠性。
八、总结
双轮差动AGV驱动系统的本质,是一个典型的多工况力学系统,其电机选型不能依赖单一重量参数,而必须同时考虑直线运行、转向过程以及极限原地旋转状态。
其中原地旋转工况通常决定电机规格上限,而直线工况决定持续运行能力,圆弧工况则用于验证系统控制稳定性。
只有在完整工况约束下完成驱动系统设计,才能保证AGV在复杂工业环境中的长期稳定运行。