



- By YIKONG
- 2026-03-24 14:04:49
- 技术支持
亿控智能|AGV核心行走部件深度解析:驱动轮、舵轮与脚轮的技术应用与选型逻辑
在智能制造与厂内物流自动化场景中,AGV(自动导引车)的行走系统直接决定整机的运动精度、承载能力、空间适应性与成本控制。驱动轮、舵轮与脚轮作为AGV底盘的三大核心部件,其技术路线与选型策略,不仅影响单一性能指标,更决定整机系统级表现。本文基于工业应用实践,对三类核心部件进行系统性拆解,并结合关键运动模型与工程参数进行深入分析。

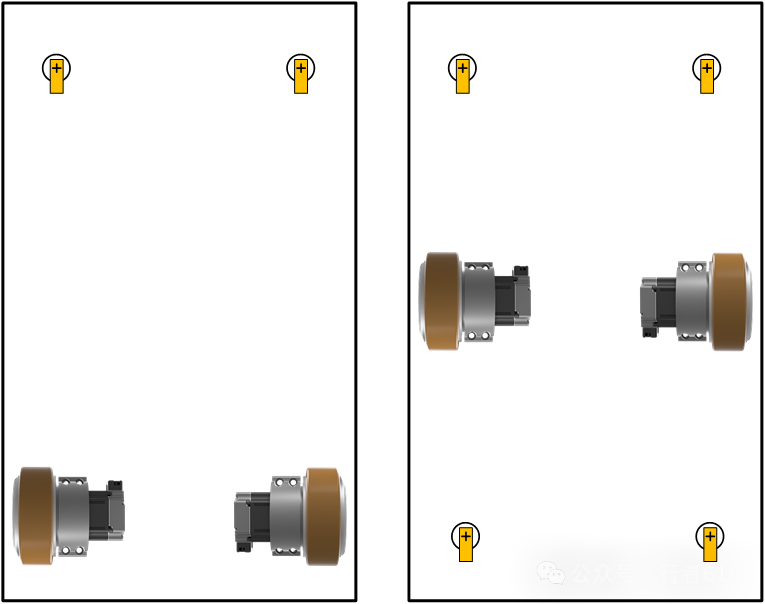
一、驱动轮:差速驱动方案的技术特性与应用边界
驱动轮是AGV动力输出的核心执行单元。在中小载荷场景中,差速驱动凭借结构简单与成本优势,长期占据主流地位。其本质是通过左右驱动轮之间的速度差,实现整车的转向与运动控制。

1.1 差速驱动核心运动原理
差速驱动AGV的运动完全由两侧驱动轮的线速度差决定。无论是直线行驶、曲线转弯还是原地旋转,均可通过左右轮速度组合实现,其核心关系如下:
v_diff = v_L - v_R
其中,v_L与 v_R 分别表示左右驱动轮线速度,而速度差 v_diff 决定车辆的转向趋势。当两侧车轮速度大小相等、方向相反时,系统进入零半径旋转状态,此时整车绕自身中心原地旋转,其角速度可表示为:
ω = 2v / B
该模型构成差速AGV运动控制与里程计计算的基础,但同时也意味着系统对轮速一致性与地面条件具有较高依赖性。
1.2 差速驱动轮的技术特性分析
从工程角度来看,差速驱动方案的最大优势在于其结构极为简洁。由于无需独立转向机构,整车控制系统仅需调节两台驱动电机即可完成全部运动控制,这使得系统实现门槛较低,同时在成本控制方面具有明显优势。在狭小空间中,差速驱动同样具备一定灵活性,尤其是原地旋转能力,使其能够满足大多数基础搬运需求。
然而,这种结构的局限性同样明显。由于车辆运动完全依赖两轮速度差,任何微小的速度误差或地面摩擦差异都会被放大并累积,从而影响定位精度。在高速或重载工况下,这种误差更容易转化为侧滑或轨迹偏移。此外,由于缺乏横向自由度,差速驱动无法实现真正意义上的全向运动,这在高端制造场景中成为关键限制因素。
1.3 差速驱动轮的应用边界
基于上述特性,差速驱动轮更适用于中小载荷且对精度要求相对宽松的应用环境,例如基础物料搬运、早期磁导航或二维码导航系统,以及对成本高度敏感的自动化改造项目。在这些场景中,其性价比优势仍然十分突出。

二、舵轮:驱动与转向一体化的高端行走核心
与差速驱动不同,舵轮将驱动、转向与承载功能高度集成,是实现AGV全向运动的核心技术路径。其性能水平通常直接代表整机的技术等级。

2.1 舵轮早期应用受限的技术原因
舵轮技术虽具备明显优势,但在早期并未广泛普及,这主要源于结构尺寸、应用需求以及成本三方面的制约。从结构角度来看,早期舵轮产品安装高度普遍在250mm以上,而潜伏式AGV对底盘高度的要求通常不超过250mm,这种尺寸不匹配直接限制了其应用空间。
从应用需求角度分析,早期物流场景以单向输送为主,差速驱动已能够满足绝大多数需求,舵轮所带来的全向运动能力并未形成刚性需求。同时,如果通过差速系统实现双向能力,仅需增加驱动单元即可完成,相比之下舵轮的优势并不明显。
此外,舵轮核心部件在早期高度依赖进口,成本较高,国内技术起步较晚,使得中小企业难以承受其应用成本,这进一步降低了市场渗透率。
2.2 舵轮的核心技术优势
随着制造业对柔性化与高精度要求的提升,舵轮的优势逐渐凸显。其最显著特点在于具备真正意义上的全向运动能力,通过独立转向与驱动控制,AGV可以实现横移、斜行及原地旋转等复杂运动,大幅提升空间利用率。
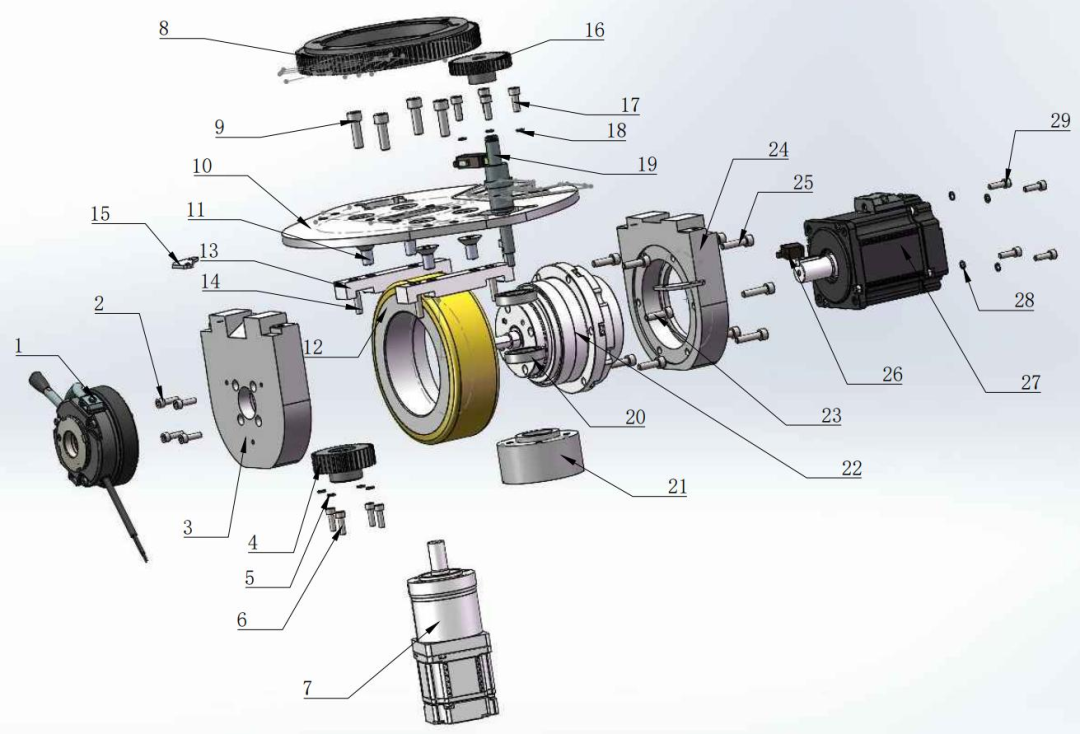
在控制精度方面,舵轮通常集成高精度伺服系统与绝对值编码器,其转向重复定位精度可达到±0.1°级别,能够满足自动化产线中的高精度对接需求。同时,由于高度集成化设计,单个舵轮即可替代多组差速驱动单元,从而简化底盘结构并提升系统可靠性。在负载能力方面,舵轮覆盖范围极广,从轻载设备到数吨级重载AGV均可适配,具备良好的工程扩展性。
2.3 舵轮技术发展趋势
近年来,舵轮技术正朝着小型化、模块化与高精度方向快速发展。通过结构优化与电机集成设计,低矮型(Low Profile)舵轮已可实现200mm以下安装高度,使其能够广泛应用于潜伏式AGV。与此同时,驱动、转向、制动与传感系统的一体化设计,使舵轮逐渐演变为标准化模块,显著降低系统集成难度。
在控制层面,随着绝对值编码器与高性能控制算法的普及,舵轮的重复定位精度持续提升,进一步强化其在高端制造领域的应用优势。
2.4 舵轮典型应用场景
舵轮目前已广泛应用于潜伏式AGV、顶升式AGV以及对精度与空间要求极高的制造场景,例如汽车生产线、3C电子装配及新能源行业。同时,在重载搬运领域,舵轮凭借其优异的承载与控制性能,已成为吨级以上AGV的主流选择。

三、脚轮:随动支撑系统的关键工程要素
相比驱动轮与舵轮,脚轮不直接参与动力输出,但其在整机中的作用不可忽视。作为随动支撑部件,脚轮直接影响AGV运行的稳定性、平顺性以及整体寿命,是底盘设计中不可或缺的一环。

3.1 脚轮选型的核心物理指标
在实际工程中,脚轮选型必须与底盘结构高度匹配。首先需要保证脚轮与驱动轮或舵轮在同一受力平面内,通常要求安装高度误差控制在2mm以内,以避免出现单轮过载或悬空现象,从而影响整车稳定性。
在承载能力方面,单个脚轮的额定承载通常需大于总载荷按轮数均分后的值,并预留约20%的安全裕量,以应对冲击载荷与不均匀受力情况。此外,轮径与轮宽的选择同样关键,较大的轮径有助于提升越障能力并降低滚动阻力,而轮宽则直接影响接地压力与摩擦特性。
在空间受限的底盘设计中,还需要对脚轮的旋转空间进行精确计算,以避免干涉与碰撞,其计算关系如下:
R_rotate = sqrt((L_wheel / 2)^2 + H_install^2)
Where:
L_wheel = wheel diameter (mm)
H_install = installation height (mm)
该公式为底盘结构设计提供了重要约束,是多轮布局优化的关键依据。
3.2 脚轮选型的工程要点
在材料选择方面,不同工况对应不同轮体材质。聚氨酯材料适用于洁净环境,橡胶材料更适合粗糙地面,而尼龙轮则在重载场景中表现出更高的刚性与耐磨性。在结构配置上,固定脚轮能够提供更好的直线稳定性,而万向脚轮则提升系统的随动灵活性,两者通常需要根据应用场景进行组合设计。
此外,轴承精度与轮体圆度等制造质量因素,会直接影响运行噪音与轨迹稳定性,因此在高端应用中同样需要重点关注。
3.3 脚轮典型应用场景
脚轮广泛应用于各类AGV底盘的随动支撑系统,同时也可用于轻载牵引式AGV的全轮结构方案。在重载设备中,脚轮通常作为辅助承载单元,与驱动系统协同分担载荷。
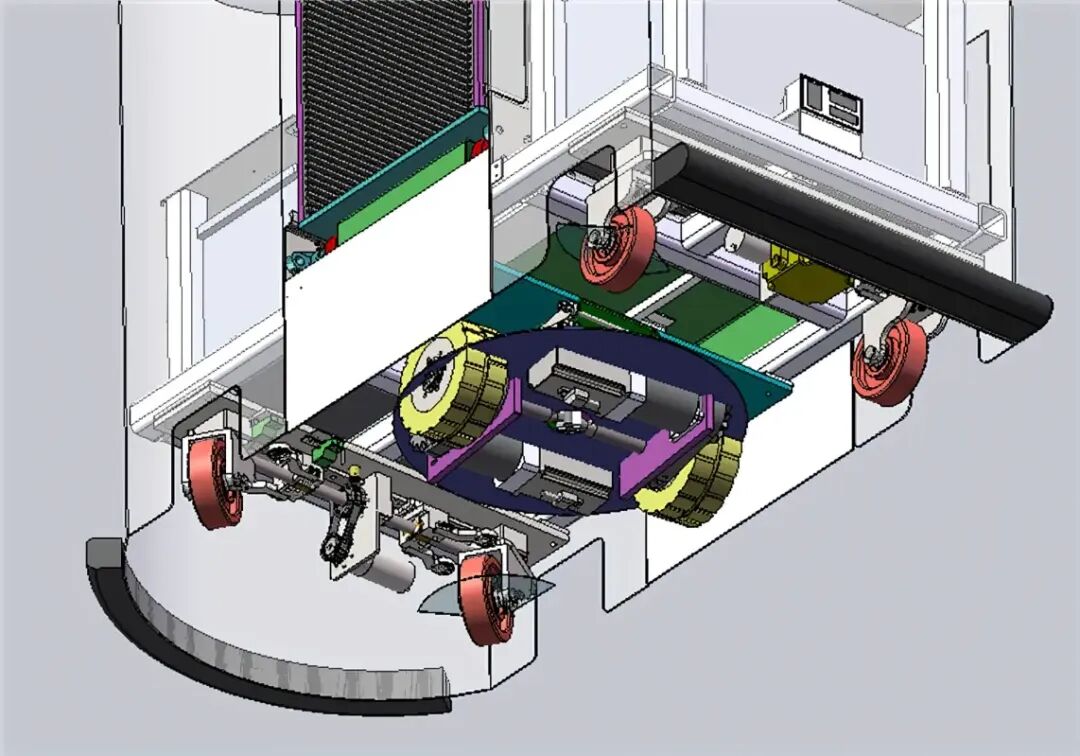
四、三大核心部件的系统选型逻辑
从系统设计角度来看,驱动轮、舵轮与脚轮并非独立选型,而是需要在成本、精度与载荷之间进行综合权衡。当系统以成本优先为导向且精度要求较低时,差速驱动轮配合万向脚轮仍然是最具性价比的方案。而在空间受限且对定位精度要求较高的场景中,舵轮结合固定脚轮的配置能够显著提升整体性能。
对于重载应用,尤其是吨级以上搬运任务,多舵轮并联结构已成为主流方案,同时辅以高承载脚轮进行辅助支撑,从而实现结构稳定性与控制性能的平衡。
五、总结
AGV行走系统的技术演进,本质上是驱动轮、舵轮与脚轮三大核心部件性能持续优化与协同设计的结果。差速驱动轮凭借成本优势,将继续在低端与专用场景中保持竞争力;舵轮则依托全向运动与高精度特性,逐步成为高端AGV的标准配置;脚轮作为基础支撑单元,也在向高承载、低噪音与长寿命方向不断升级。
未来,随着智能制造对柔性化与精细化要求的持续提升,三类部件的系统级匹配能力,将成为决定AGV整机性能的关键技术因素。