



- By YIKONG
- 2026-03-12 10:53:49
- 技术支持
亿控智能|潜伏式AGV差速驱动与舵轮驱动技术解析与应用对比

在物流自动化装备领域,潜伏式AGV(Automated Guided Vehicle)是应用最广泛的物料搬运设备之一,其驱动系统直接决定了设备的运动性能、适用场景以及运维成本。目前,潜伏式AGV主要采用两种驱动方案:差速驱动与舵轮驱动。二者在结构设计、运动实现方式、控制逻辑以及工程应用方面存在显著差异。
本文将从结构组成、运动原理、性能指标以及应用限制等多个技术维度,对差速驱动与舵轮驱动进行系统解析,为AGV研发设计、产品选型及工程应用提供参考。
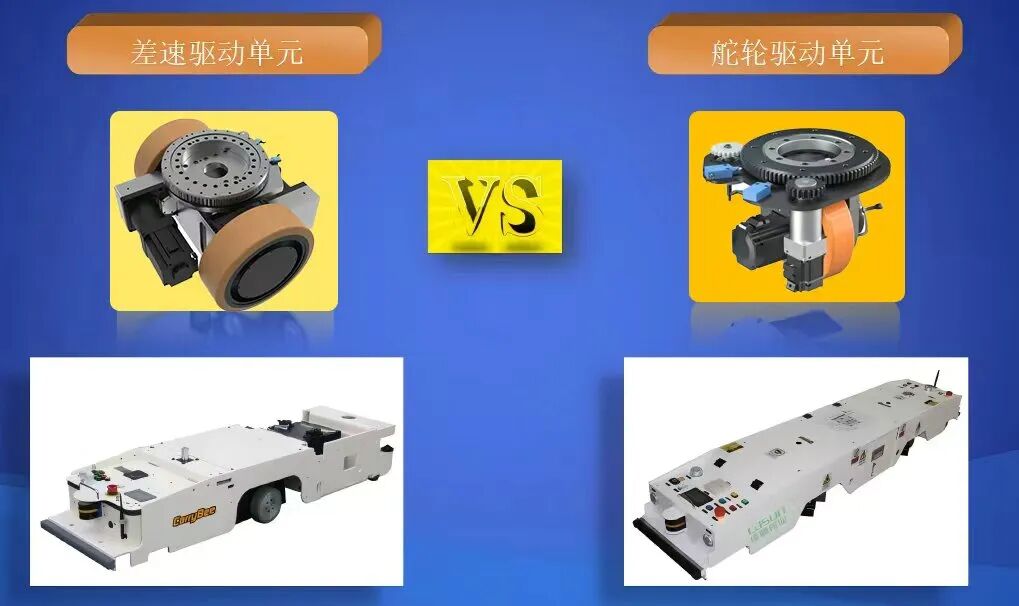
一、两种驱动形式的结构组成与运动原理
1.1 差速驱动单元:模块化组合的运动实现方式
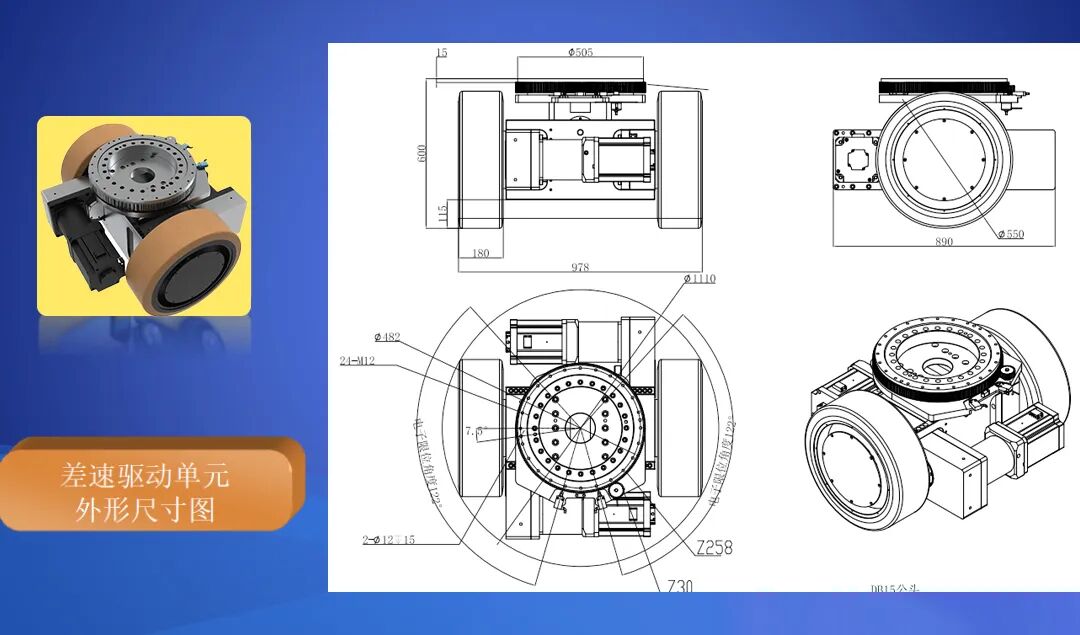
差速驱动单元以独立的行走驱动模块为核心,通过单组或多组驱动单元组合实现不同的运动功能。其转向原理依赖左右驱动轮之间的速度差来实现车辆姿态变化,属于典型的轮式差速转向结构。
单组差速驱动单元
单组差速驱动通常由一对驱动轮及其对应的电机、减速机构和支撑结构组成。由于轮距设计较长,该结构一般仅能实现单方向行走与左右转弯,运动维度相对有限,因此多用于简单的单向运输场景。
差速轮组驱动单元
当采用两组差速驱动单元时,通过前后或左右模块的协同控制,可实现双向行驶与转弯功能。然而其转向仍依赖轮速差实现,因此运动轨迹始终为圆弧路径,无法实现横向移动等复杂运动。
差速驱动的基本运动模型为:
左右轮线速度差决定车辆的转向角速度。当轮距固定时,轮速差越大,转弯半径越小。
该特性也决定了差速驱动在高速运行时对控制精度要求较高,否则容易出现运动稳定性下降的问题。
1.2 舵轮驱动单元:高度集成的机电一体化方案
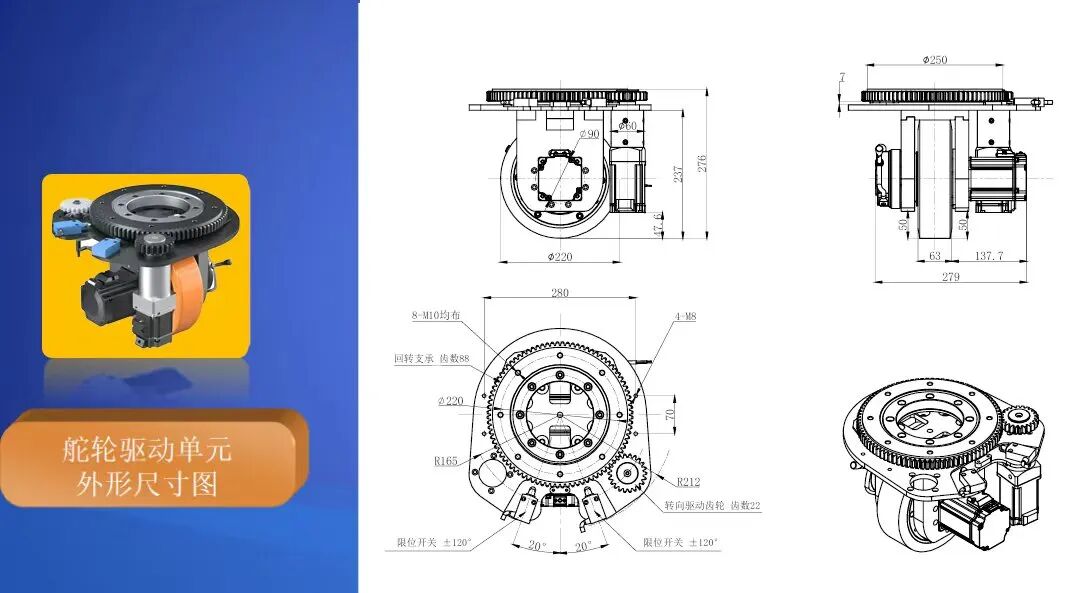
舵轮驱动单元是一种将驱动与转向功能集成于同一模块的机电一体化产品。该结构通过独立的行走电机与转向电机分别控制轮子的旋转和方向调整,从而实现更加灵活的运动控制。
与差速驱动相比,舵轮系统取消了依赖轮速差的转向方式,而是通过独立转向机构直接改变轮体方向,实现更精准的运动控制。
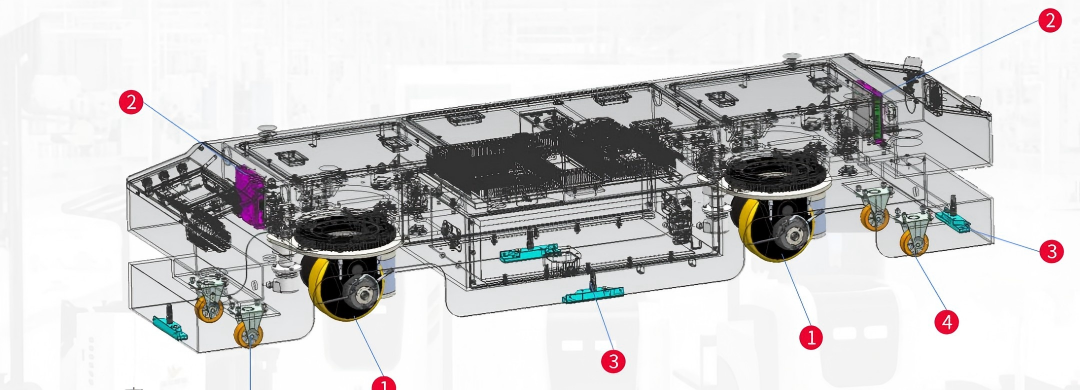
舵轮驱动系统通常遵循三点一面的机械稳定原则进行整车布局,因此在大多数应用场景下无需额外的悬挂或减震机构。
单舵轮驱动
单个舵轮驱动单元即可实现车辆的前进、后退及转弯运动。与差速驱动相比,转向响应更直接,且不存在轮速差带来的动力损耗。
双舵轮驱动
当AGV配置两台舵轮时,通过转向角度与行走速度的协同控制,可实现全向运动能力,包括:
前进 / 后退
原地旋转
90°横向移动
任意角度转向
这种运动模式能够显著提升AGV在窄通道、高密度仓储环境中的机动能力。
舵轮系统的转向精度主要取决于编码器分辨率与齿轮传动比。通过转向编码器与减速机构的精确配合,可实现高精度角度控制,从而提升整车定位精度。
二、差速驱动与舵轮驱动的核心技术参数对比
在实际应用中,两种驱动方式在结构尺寸、运动性能、控制精度及运维成本等方面存在明显差异。
结构尺寸
差速驱动采用模块化组合结构,需要额外的安装支架与传动组件,整体结构相对分散,占用空间较大;而舵轮驱动将电机、减速器及转向机构高度集成在同一模块中,因此整体体积更为紧凑。
双向行驶能力
差速驱动若要实现双向行驶,通常需要配置两组驱动单元;而舵轮驱动通过行走电机正反转即可实现双向运行,控制逻辑更加简单。
全向运动能力
差速驱动的转向方式决定了其运动轨迹为圆弧路径,因此无法实现横向平移等复杂运动;舵轮驱动通过独立转向结构能够实现真正意义上的全向移动。
维护成本
差速驱动由多个模块组合而成,机械连接点较多,在长期运行中容易产生磨损或接触问题;舵轮系统由于高度集成,结构节点减少,故障概率相对更低。
定位精度
差速驱动的定位误差通常来源于轮速差控制误差以及机械间隙累积;舵轮驱动通过编码器反馈实现转向与行走的双闭环控制,因此定位精度更高。
牵引能力
差速驱动系统的动力分布在多个模块中,传动链较长;舵轮驱动采用集中式牵引设计,动力传递效率更高,因此能够提供更大的牵引力。
运行速度
差速驱动在高速运行时容易受到轮速差控制精度的限制,而舵轮驱动由于采用独立转向控制,在较高速度下仍能保持稳定运行。
三、潜伏式AGV驱动形式的应用现状
3.1 差速驱动仍是潜伏式AGV的主流方案
从行业发展历史来看,国内潜伏式AGV技术最早源于日本AGV体系,而日本AGV长期采用差速驱动结构。早期汽车制造行业的AGV应用同样以差速驱动为主,这在行业内形成了明显的技术路径依赖。
因此,尽管舵轮技术不断发展,目前市场上大量潜伏式AGV仍然采用差速驱动结构。
另一方面,一些大型企业如新松等在重载AGV领域大量使用舵轮驱动,但由于潜伏式AGV通常具有低高度、轻载荷等设计特点,与重载AGV的结构需求不同,因此差速驱动在该细分领域仍占据较大比例。
3.2 舵轮驱动在潜伏式AGV中的应用限制
尽管舵轮驱动在性能方面具有明显优势,但其在潜伏式AGV中的应用长期受到两个关键因素限制。

尺寸限制
早期全球主流舵轮产品主要面向重载AGV市场,其整体高度通常较高,而潜伏式AGV整车高度通常需要控制在较低范围内,导致安装空间不足。
成本限制
过去高性能舵轮产品多依赖进口,价格远高于差速驱动模块。对于以轻型载荷与批量应用为主的潜伏式AGV而言,这种成本投入难以满足工程应用的性价比要求。
技术认知因素
由于行业长期采用差速驱动结构,部分AGV企业在产品开发中形成了固定的技术思路,对舵轮驱动的结构适配与控制算法缺乏深入研究,这也在一定程度上影响了其推广速度。
四、舵轮驱动在潜伏式AGV中的发展趋势
随着AGV产业技术升级以及国产化核心部件的突破,舵轮驱动正在逐步进入潜伏式AGV应用领域,其技术突破主要体现在两个方面。
低高度舵轮的国产化突破
近年来,随着国产核心驱动部件技术不断成熟,以 亿控智能 TEC120 卧式舵轮 为代表的低高度舵轮产品逐步实现工程化应用。该系列舵轮专门针对潜伏式AGV的低车身结构进行优化设计,在保证驱动性能的同时,大幅降低整体安装高度,使舵轮驱动系统能够适配潜伏式AGV的整机结构要求。

该类产品不仅解决了潜伏式AGV安装空间受限的问题,而且单舵轮即可满足基本行驶与转弯需求;当采用双舵轮结构时,还可实现潜伏式AGV的全向运动能力。
AGV厂商自主设计能力提升
随着国内AGV企业研发能力不断提升,越来越多厂商开始尝试舵轮驱动结构,并完成了整车结构适配与运动控制算法开发。
通过单舵轮结构可以实现双向行驶与转弯,而双舵轮结构则可以实现全向运动控制,显著提升AGV在复杂物流环境中的灵活性。
从技术趋势来看,舵轮驱动在灵活性、精度以及载荷能力方面更符合未来物流自动化的发展需求,而国产化技术突破也有效降低了其应用成本。
五、技术总结
差速驱动与舵轮驱动分别代表了模块化组合设计与机电一体化集成设计两种不同的技术路线。
差速驱动依托成熟的技术体系和长期行业应用经验,目前仍是潜伏式AGV的重要驱动方式,但在体积、精度以及运动灵活性方面存在一定局限。
舵轮驱动则凭借高度集成的结构设计、全向运动能力以及更高的定位精度,逐渐成为潜伏式AGV驱动系统的重要升级方向。随着国产舵轮技术的发展,其在尺寸与成本方面的应用障碍正在逐步被解决。
对于AGV研发与应用企业而言,驱动系统的选择需要综合考虑作业环境、载荷需求、空间限制以及整体成本。在简单搬运场景中,差速驱动仍具有较高的经济性;而在窄通道、高密度以及高灵活性要求的物流场景中,舵轮驱动则更具技术优势。
随着驱动技术的不断进步,舵轮驱动与潜伏式AGV的适配性将进一步提升,推动物流自动化装备向更高性能与更高智能化水平发展。