



- By YIKONG
- 2026-02-26 09:57:20
- 技术支持
AGV电机功率如何选型?刹车系统配置与驱动系统设计详解
前言
在智能制造与自动化物流系统中,自动导引车(AGV,Automated Guided Vehicle)的动力系统设计直接关系到设备运行效率、安全性能以及长期可靠性。其中,驱动电机与刹车系统的选型是AGV整车设计中的核心环节,其合理性不仅影响整车动力性能,也决定了系统在紧急制动、坡道运行以及高精度定位等复杂工况下的安全稳定性。

在实际工程应用中,AGV动力系统的选型往往受到多种因素的共同影响,包括负载质量、运行速度、定位精度、地面条件以及运行环境等。如果仅依赖经验选型,容易出现电机功率冗余或动力不足的问题,进而影响系统效率和设备寿命。
本文从工程力学计算依据、选型决策矩阵以及特殊工况处理三个维度,对AGV刹车电机与驱动电机的选型方法进行系统分析,并结合实际工程经验提出标准化选型流程,为AGV系统设计人员提供具有工程指导意义的技术参考。
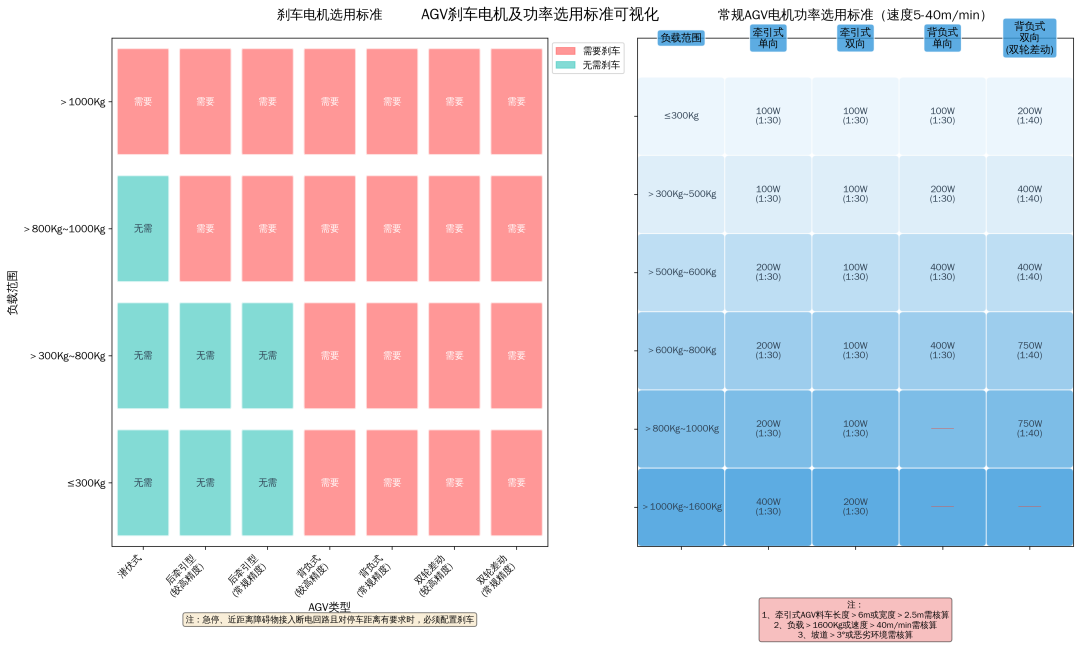
一、刹车电机选型标准:安全优先的决策体系
刹车系统是AGV安全控制体系中的关键执行单元,其主要作用是在紧急停车或断电情况下快速建立制动力,确保车辆在规定距离内停止,并防止设备在坡道或载荷变化条件下产生溜车现象。
刹车系统是否配置以及刹车力矩大小,通常需结合负载等级与AGV结构类型进行综合判定,其基本原则是保证紧急制动时的停车距离满足系统安全要求。
1.1 基础选型矩阵
核心判定逻辑
随着负载质量增加,系统惯性力线性增长:
F = m × a
其中:
F = 惯性力 (N)m = AGV总质量 (kg)a = 减速度 (m/s²)
因此刹车系统配置阈值通常与负载等级呈正相关。
对于高精度定位AGV(±10 mm),由于停车精度要求更高,通常需要配置刹车系统。
1.2 强制配置条件
在以下工况下,无论AGV负载大小,均必须配置刹车系统:
安全急停需求
例如激光避障或安全光栅触发,需要快速停车。
停车距离要求
例如停车距离 ≤300 mm。
坡道运行
当坡度 >2° 时,为防止溜车必须配置刹车。
运输危险或精密货物
例如电子设备、玻璃、化学品等。
1.3 刹车力计算依据
刹车系统需满足动力学平衡:
Fb ≥ (m_agv + m_load) × g × (μ × cosθ + sinθ)
其中:
Fb = 刹车力 (N)m_agv = AGV自重 (kg)m_load = 负载质量 (kg)g = 重力加速度 (9.81 m/s²)μ = 地面摩擦系数 (0.6–0.8)θ = 地面坡度角
工程设计通常采用安全系数:
F_design = 1.5 ~ 2.0 × Fb
以确保在负载变化或摩擦系数变化时仍满足安全制动要求。
二、驱动电机功率选型:基于能量平衡的计算方法
驱动电机功率选型需综合考虑:
AGV总质量运行速度启动加速度地面摩擦阻力传动效率
常规选型适用于运行速度 30–60 m/min 的AGV。
2.1 常规选型矩阵

减速机速比计算
输出扭矩公式:
T_out = T_motor × i × η
其中:
T_out = 输出扭矩T_motor = 电机额定扭矩i = 减速比η = 传动效率 (0.9–0.95)
2.2 功率计算模型
基础运行功率
P1 = (F × v) / η
其中:
P1 = 基础驱动功率 (kW)F = 运行阻力 (N)v = 运行速度 (m/s)η = 传动效率
坡道功率
P2 = (m_agv + m_load) × g × v × sinθ
启动加速功率
P3 = (m_agv + m_load) × v² / (2 × t)
其中:
t = 加速时间 (通常 3–5 s)
电机总功率需求
P_motor ≥ K × (P1 + P2 + P3)
其中:
K = 功率安全系数 (1.2–1.5)
三、非常规工况处理
以下情况不适用标准选型表,必须进行专项计算。
牵引式AGV
料车长度 >3 m料车宽度 >1.5 m牵引数量 >5 台
需考虑车列惯性与牵引力分布。
负载特性
负载 >2 t重心偏移 >200 mm
需计算倾覆力矩。
高速运行
运行速度 >80 m/min加速时间 <2 s
需考虑冲击电流。
极端环境
坡度 >5°环境温度 < −10°C 或 >50°C高粉尘或高湿环境
需考虑功率降额与防护等级。
四、工程应用与验证
4.1 标准选型流程
1 工况定义明确AGV类型、负载、速度和环境。
2 初步选型根据选型表确定电机功率。
3 力学计算验证实际功率需求。
4 特殊工况分析判断是否需要专项计算。
5 最终方案确定综合技术与成本确定配置。
4.2 性能验证测试
电机选型完成后需进行以下测试:
额定负载测试
连续运行4小时,监测温升。
超载测试
1.2倍负载运行1小时。
刹车测试
急停距离要求:
S ≤ v / 20
其中:
S = 停车距离 (m)v = 运行速度 (m/min)
耐久测试
循环启停 ≥1000 次。
五、结论与工程建议
AGV驱动系统选型是一项典型的机电系统工程,需要在安全性、可靠性与经济性之间取得平衡。
工程实践中建议遵循以下原则:
安全优先原则刹车系统配置应适当保守。
计算驱动原则避免经验选型造成动力不足或功率浪费。
非常规工况专项分析原则
实验验证原则
通过建立标准化选型流程,可以显著提升AGV系统设计的可靠性与工程一致性,为智能制造物流系统提供稳定可靠的动力基础。