



- By YIKONG
- 2026-02-12 16:02:57
- 技术支持
永磁电机三十年:BLDC与PMSM如何从分道扬镳走向殊途同归
引言
如果你是电机行业的从业者或学习者,大概率被问过这个问题:
“BLDC和PMSM到底有什么区别?”
你翻过教科书,查过技术文章,得到的答案通常是这样的:
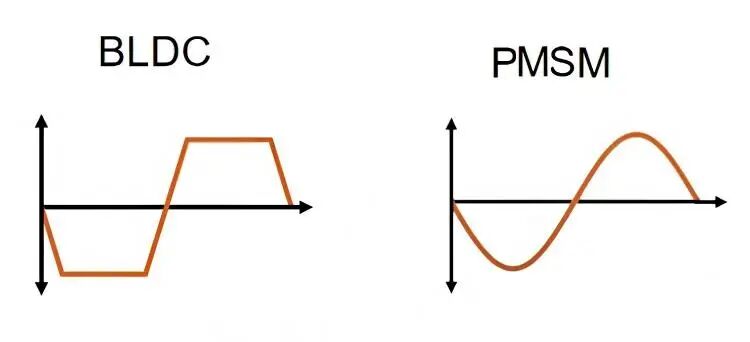
BLDC是梯形波反电动势,PMSM是正弦波;
BLDC是集中绕组,PMSM是分布绕组;
BLDC用方波驱动,PMSM用正弦波/FOC。
然后你走进研发车间,看到工程师正在给一台“BLDC电机”做FOC调试,电流波形光滑如丝;隔壁工位的一台“PMSM”为了降本,正用着六步换向。你问他们这俩到底怎么分,他们头也不抬地说:
“现在没太大区别了。”
这不是理论含糊,也不是教科书过时——而是技术进化速度超过了命名体系的更新速度。本文无意继续制造一套新的“区分标准”,而是试图还原:这两条技术路线从何而来,为何趋同,以及——在今天——如何谈论它们才不会出错。
第一部分:两条技术路线的历史起点
BLDC与PMSM确实有着不同的“出身”。理解这一点,是理解它们为何趋同的前提。
1.1 BLDC:有刷直流电机的电子化继承者
设计原型:有刷直流电机。
有刷直流电机的优点是控制简单——给电压就转,换向由机械电刷完成。缺点是电刷会磨损、打火、限速。工程师们的梦想是:保留它简单的控制特性,把机械换向换成电子换向。
于是无刷直流电机(BLDC)诞生了。它的设计逻辑非常直接:
控制策略:沿用方波电流、六步换向。每60°电角度切换一次导通相,让定子磁场跳着走。
电机设计:为了让方波电流产生最大且平稳的转矩,反电动势在导通区间内最好恒定不变——这就是梯形波反电动势的设计目标。
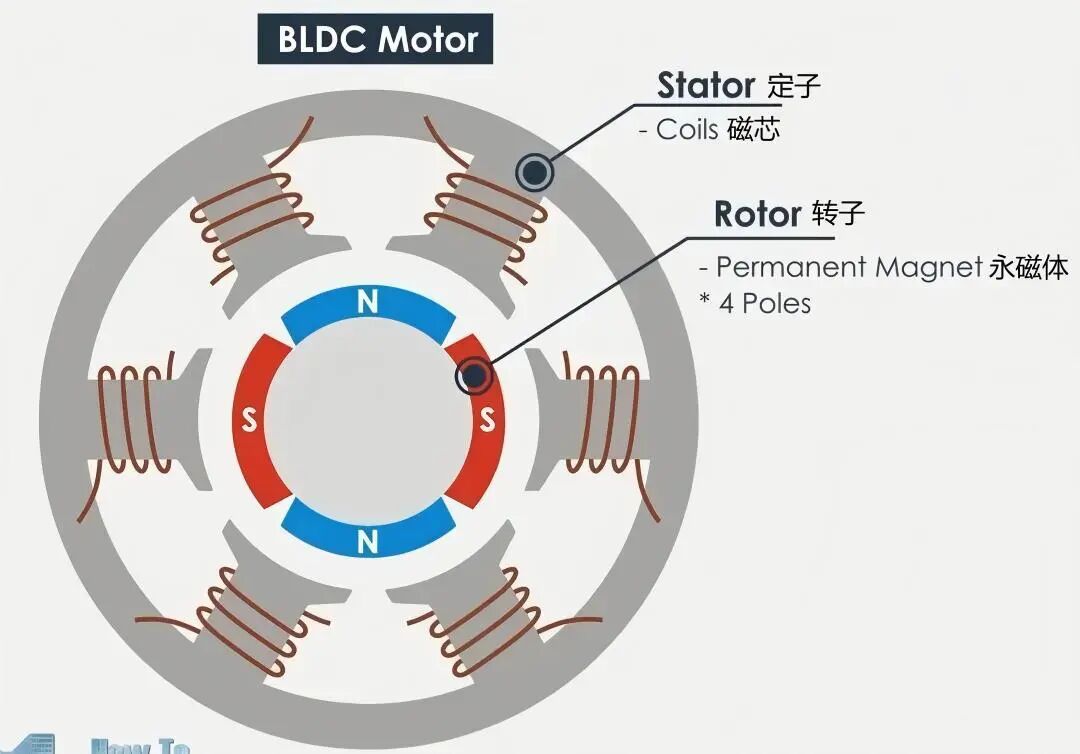
结构手段:磁极做成瓦片形、平顶充磁,使气隙磁密在宽区域内均匀;绕组采用集中式,一个齿绕一个线圈,磁通变化干脆利落。
这是一条“从控制反推设计”的技术路线。 控制逻辑简单,电机为之适配。
1.2 PMSM:交流同步电机的永磁化分支
设计原型:电励磁同步电机。
交流同步电机的理想运行状态,是定子产生正弦波旋转磁场,转子磁场与之同步旋转,二者夹角决定转矩。用永磁体替代励磁绕组,就是永磁同步电机(PMSM)的雏形。
它的设计逻辑与BLDC正好相反:
控制目标:追求连续、平滑、无脉动的转矩。
电机设计:为了让电流与磁场连续平滑地相互作用,反电动势最好是正弦波——这样,当通入正弦电流时,电磁功率恒定,转矩无脉动。
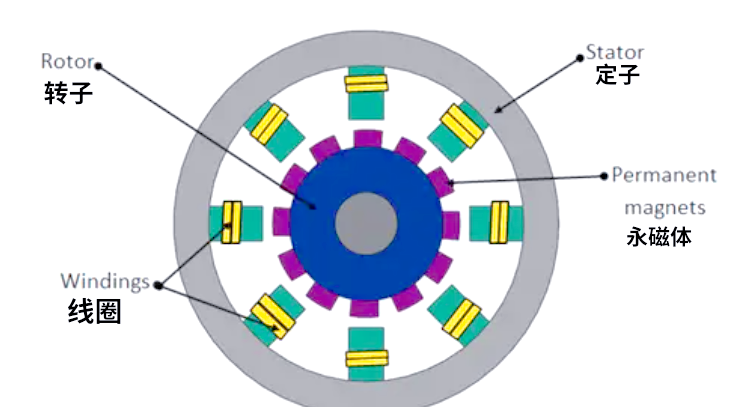
结构手段:磁极削成抛物线形或正弦充磁,使气隙磁密呈正弦分布;绕组采用分布式,跨齿绕制,使一相绕组合成磁通自然趋近正弦。
这是一条“从设计适配控制”的技术路线。 电机设计追求完美正弦,控制算法为之匹配。
1.3 历史上的“标准搭配”
在算力昂贵的年代,这两条路线井水不犯河水:
方波控制:算法简单,可用低成本MCU、霍尔传感器实现,是BLDC的标配。代价是转矩脉动大、有换相噪声。
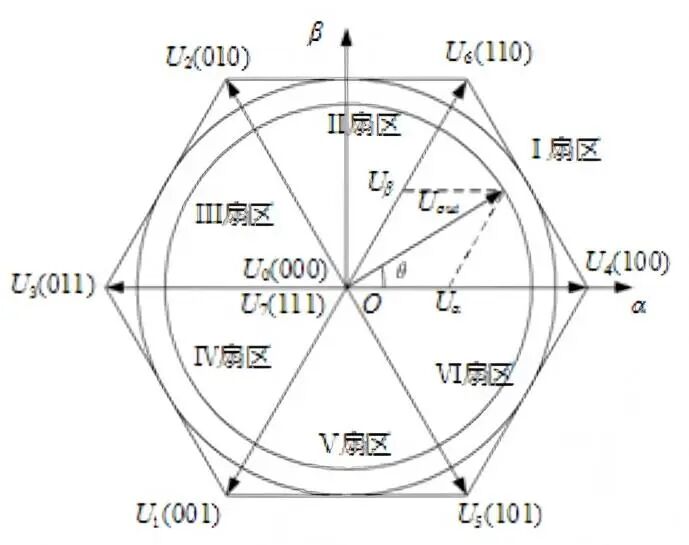
正弦波/FOC控制:算法复杂,需要高性能DSP、高精度位置传感器,是PMSM的专利。收益是转矩平滑、效率高、噪声低。
那时的工程师区分二者很容易:看驱动器和传感器就够了。
第二部分:技术趋同——当算力不再是瓶颈
过去十年,电机控制芯片的算力呈指数级增长,成本却持续下降。这一变化彻底改写了游戏规则。
2.1 控制策略的全面互通
BLDC可以用FOC/正弦波驱动了。
这不是实验室的论文设想,而是2026年随处可见的工程现实:
东芝2026年2月官方新闻:发布“用于三相BLDC电机的正弦波PWM驱动控制器”,明确支持“无论电机类型”,可降低振动噪声、提高效率。
吉林大学《汽车工程》2025年7月论文:标题即《应用于EMB系统的BLDC电机低成本正弦波驱动控制策略》,系统研究了如何用低分辨率霍尔传感器实现BLDC的正弦波控制。
Qorvo技术文章:详细阐述磁场定向控制(FOC)在BLDC电机上的实现原理,称正弦波驱动是“理想解决方案”。
PMSM也可以用方波驱动了。
这从未消失过。在成本敏感、对转矩脉动容忍度高的应用中,六步换向仍然是PMSM“降本增效”的可行妥协——尽管会牺牲一部分平滑性。
结论: “BLDC=方波、PMSM=正弦波”这条公式,已经失效。
2.2 电机设计的双向渗透
控制策略的自由组合,反过来倒逼电机设计不再“画地为牢”:
BLDC为了降噪,可以通过磁极优化使反电动势趋近正弦波。这样的电机,本体仍习惯叫BLDC,但驱动器配FOC效果极佳。
PMSM为了降本,越来越多地采用集中绕组。这样的电机,本体仍是正弦波设计目标,但结构上已无法用“绕组形式”区分。
结论: “BLDC=集中绕组、PMSM=分布绕组”这条公式,早已失效。
2.3 唯一没变的东西
还有一条没有变:反电动势波形是设计阶段确定的物理属性,不会因驱动方式而改变。
一台设计为梯形波反电动势的电机,无论你用方波还是FOC驱动它,用示波器测空载反电动势,它依然是梯形波。
但问题是——这还重要吗?
对于终端用户,他们只关心:这电机装上去抖不抖、费不费电、贵不贵。反电动势波形是梯形还是正弦,是研发工程师在磁路设计阶段考虑的事,不是选型采购阶段纠结的事。
结论: 反电动势波形依然是电机本体的物理特征,但它已不再作为“电机类型”的判定依据——因为判定本身已经失去了工程意义。
第三部分:2026年,如何谈论永磁电机才不出错?
既然“区分”已经不再是正确的问题,那么正确的问题应该是:如何描述一台永磁电机,才能让听者准确理解它的特征和用途?
以下表述范式,可供工程师、采购、教学等不同场景参考。
3.1 谈论电机本体时:用物理参数说话
不推荐:
“这是BLDC电机。”“这是PMSM电机。”
推荐:
“这是一台梯形波反电动势的永磁电机,适合方波或正弦波驱动,成本较低、功率密度高。”“这是一台正弦波反电动势的永磁电机,转矩脉动小、运行平滑,适合高精度应用。”
为什么?“BLDC”和“PMSM”已经承载了太多过时的联想。直接描述反电动势波形,才是不会过时、不可篡改的技术事实。
3.2 谈论控制策略时:明确区分“本体”与“驱动”
不推荐:
“这是FOC驱动的PMSM系统。”“这是方波驱动的BLDC系统。”
推荐:
“我们在这台梯形波永磁电机上采用FOC控制,以降低运行噪声。”“这套正弦波永磁电机系统出于成本考虑,暂时使用六步换向驱动。”
为什么?电机本体和驱动策略是正交的两个维度。任何电机都可以配任何驱动——只是匹配度、成本和性能表现不同。把二者混为一谈,只会制造混乱。
3.3 谈论产品选型时:跳过类型之争,直接描述需求
不推荐:
“我们需要BLDC还是PMSM?”
推荐:
“我们需要低成本、高转速、对转矩脉动不敏感的方案 → 传统梯形波设计+方波驱动即可。”“我们需要低噪声、平滑控制、宽高效区的方案 → 正弦波优化设计+FOC驱动。”“我们需要平衡成本和性能 → 梯形波本体+FOC驱动,是2026年性价比较高的组合。”
为什么?用户需要的从来不是“BLDC”或“PMSM”这个名字,而是某种性能、成本和可靠性的组合。绕过名称,直击需求,才是专业的选型语言。
第四部分:结论——命名终将滞后于技术
BLDC与PMSM的区分难题,本质上是工业术语的惯性与技术进化的速度之间的矛盾。
上世纪八九十年代,它们确实是两类不同的电机——不仅设计不同,控制方式也不同,连用得起它们的场合都不同。
进入二十一世纪,算力成本下降,控制策略开始跨线渗透。
到了2026年,除了反电动势波形这一“出厂设定”仍可测量外,其余传统分界线均已模糊。
这不是理论的不严谨,而是技术发展的自然结果。 就像今天我们不再纠结“数字信号处理器”和“微控制器”的严格界限,也不再需要区分“超级本”和“轻薄本”到底谁是谁——产品在融合,术语在滞后,而工程师用务实的选择投票。
所以,BLDC和PMSM现在到底有没有区别?
在电机设计工程师的磁路仿真文件里,有区别——那是瓦片形磁极与正弦削极的区别,是60°平顶宽度与总谐波畸变率的区别。
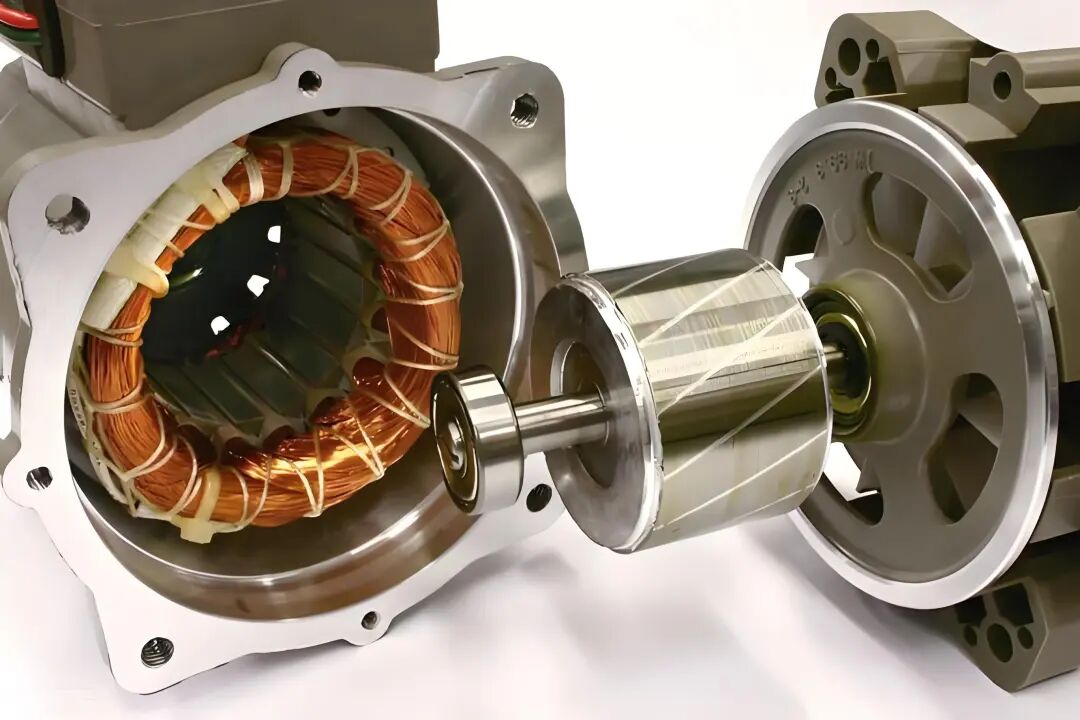
在生产线工人的眼里,没区别——都是一堆硅钢片、磁钢和铜线,绕线机调一下参数,今天产BLDC,明天产PMSM。
在系统工程师的选型表格里,区别正在消失——取而代之的是更直接的维度:反电动势波形、转矩脉动指标、成本预算、控制复杂度。
这才是2026年关于永磁电机最诚实、也最严谨的表述。